9.5.2 运动轴设置
在机构装置中添加连接元件后,还可对“运动轴”进行设置,其意义如下:
●设置运动轴的当前位置:通过在连接件和组件中选取两个零位置参考,然后输入其间角度(或距离)值,可设置该运动轴的位置。定义伺服电动机和运行机构时,系统将以当前位置为默认的初始位置。
●设置再生值:可将运动轴的当前位置定义为再生值,也就是装配件再生时运动轴的位置。如果设置了运动轴极限,则再生值就必须设置在指定的限制内。
●设置极限:设置运动轴的运动范围,超出此范围,接头就不能平移或转动。除了球接头,我们可以为所有其他类型的接头设置运动轴位置极限。
下面将以一个范例来说明运动轴设置的一般过程。本范例中需要设置两个运动轴。
Stage1.第一个运动轴设置
Step1.单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块,然后单击
,进入机构模块,然后单击 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,用“点拖动”将驱动杆子装配(actuating_rod_asm.asm)拖到图9.5.68所示的位置(读者练习时,拖移后的位置不要与图中所示的位置相差太远,否则后面的操作会出现问题),然后关闭“拖移”对话框。
,用“点拖动”将驱动杆子装配(actuating_rod_asm.asm)拖到图9.5.68所示的位置(读者练习时,拖移后的位置不要与图中所示的位置相差太远,否则后面的操作会出现问题),然后关闭“拖移”对话框。
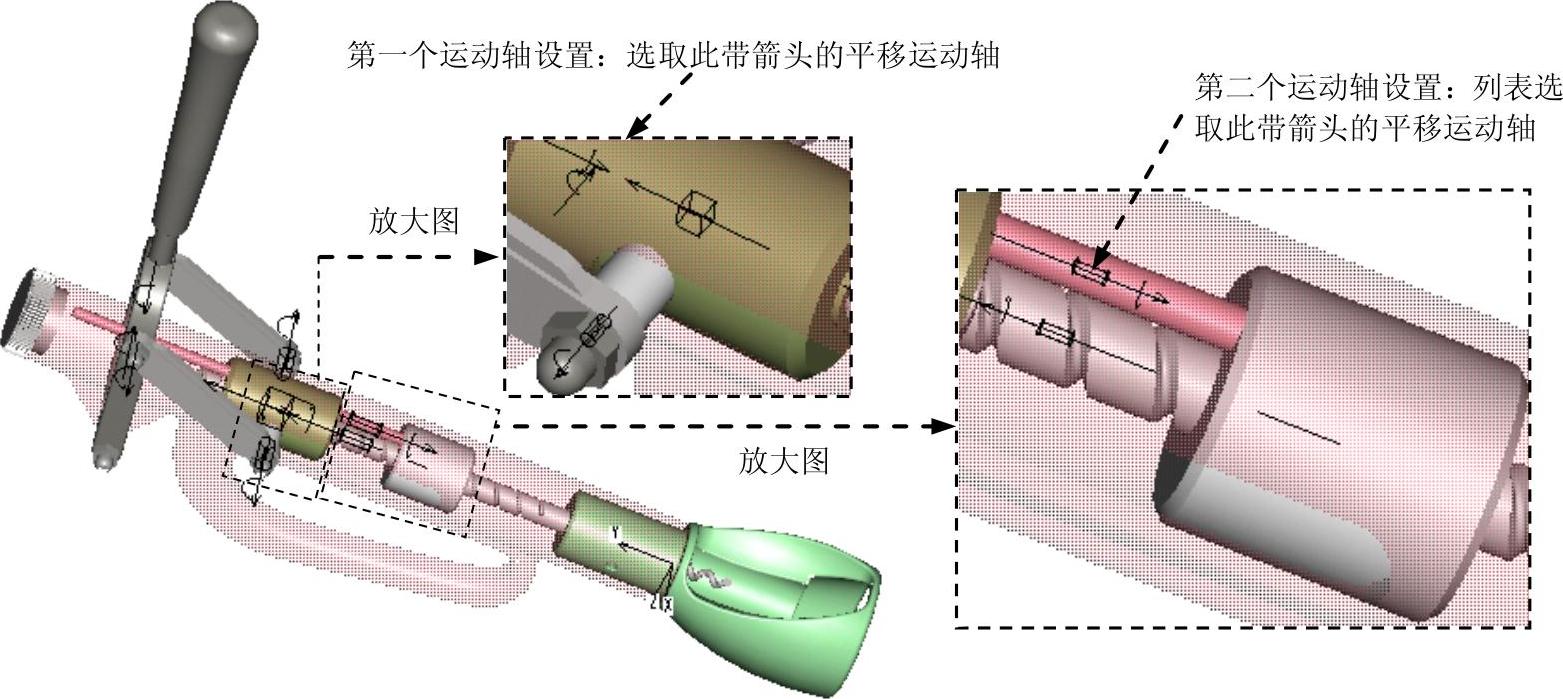
图9.5.68 运动轴设置
Step2.对运动轴进行设置。
(1)查找并选取运动轴。单击 功能选项卡
功能选项卡 区域中的“查找”按钮
区域中的“查找”按钮 ,系统弹出图9.5.69所示的“搜索工具”对话框;在“查找”列表中选取“平移轴”,在“查找范围”列表中选取CORK_DRIVER.ASM装配,然后单击
,系统弹出图9.5.69所示的“搜索工具”对话框;在“查找”列表中选取“平移轴”,在“查找范围”列表中选取CORK_DRIVER.ASM装配,然后单击 按钮;在结果列表中选取运动轴Connection_1c.first_trans_axis_,并单击
按钮;在结果列表中选取运动轴Connection_1c.first_trans_axis_,并单击 按钮将其加入选定栏中,最后单击
按钮将其加入选定栏中,最后单击 按钮,关闭对话框。
按钮,关闭对话框。
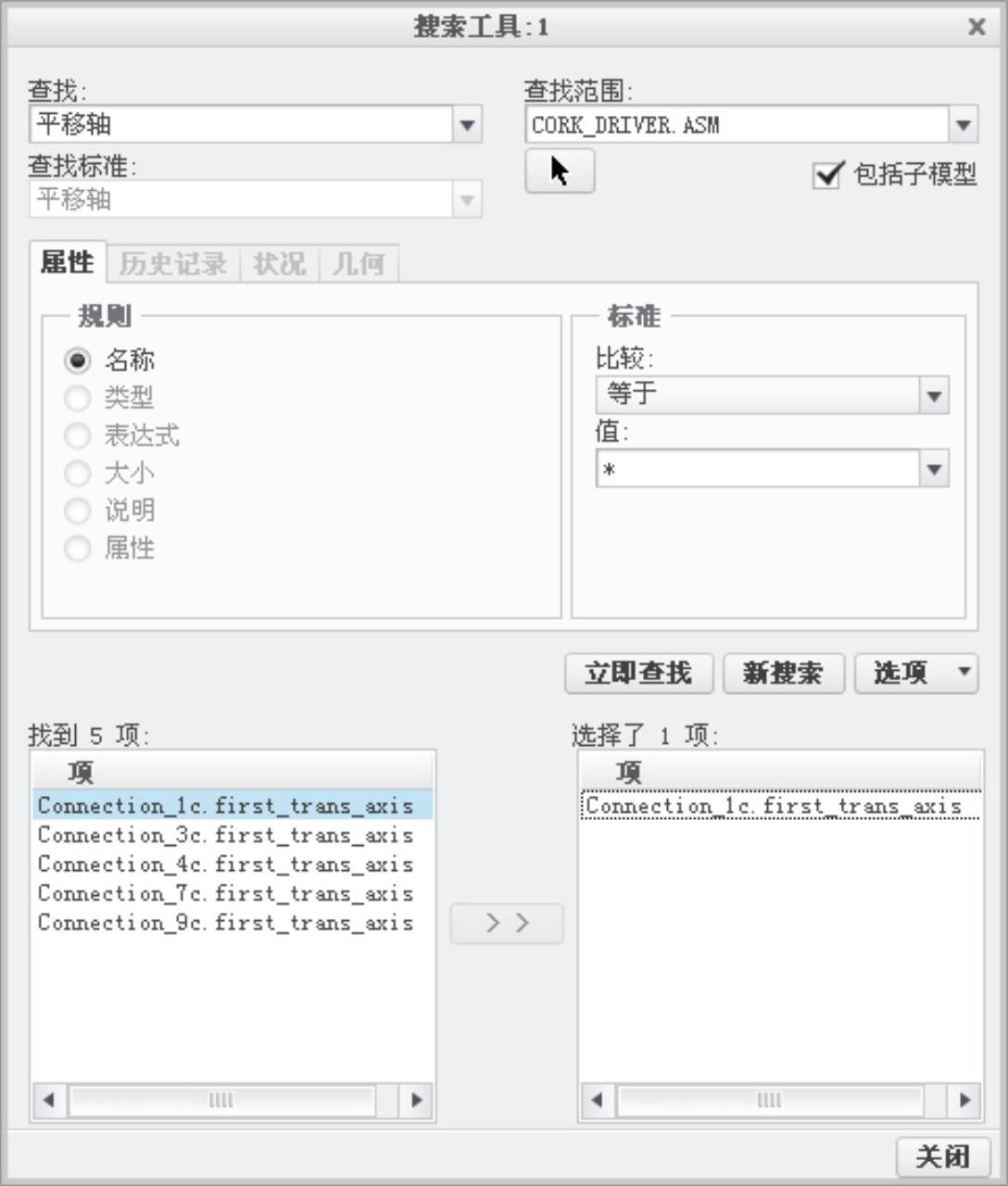
图9.5.69 “搜索工具”对话框
(2)右击,在弹出的快捷菜单中选择 命令,系统弹出图9.5.70所示的“运动轴”对话框,在该对话框中进行下列操作:
命令,系统弹出图9.5.70所示的“运动轴”对话框,在该对话框中进行下列操作:
①在连接件和组件上选取零参考。查找并选取活塞(Piston)零件中的基准平面ZERO_REF和主体(Body)零件中的基准平面ZERO_REF(图9.5.71和图9.5.72),则选取的参考自动显示在图9.5.70所示的“运动轴”对话框中。
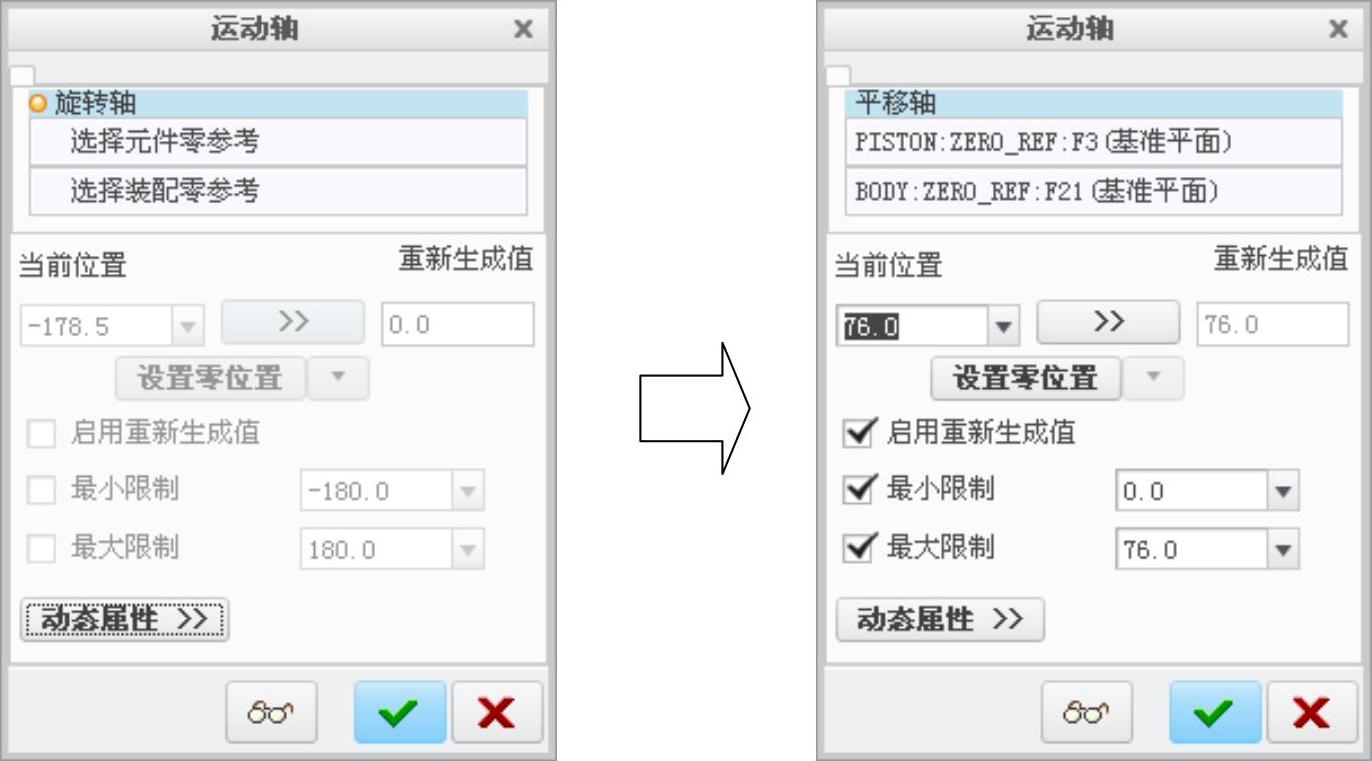
图9.5.70 “运动轴”对话框
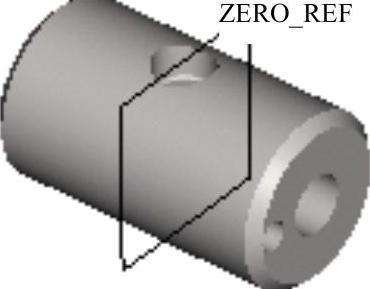
图9.5.71 活塞零件的基准平面ZERO_REF
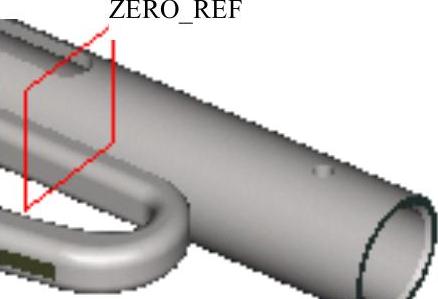
图9.5.72 主体零件的基准平面ZERO_REF
说明:
由于组件中所包含的基准面太多,所以要采用“查找”方式来选取想要的基准面。下面以选取PISTON零件中的基准平面ZERO_REF为例介绍其方法:(https://www.daowen.com)
首先,在系统提示选取目标时,单击 功能选项卡
功能选项卡 区域中的“查找”按钮
区域中的“查找”按钮 ,系统弹出图9.5.73所示的“搜索工具”对话框;在“查找”列表中选取“基准平面”,在“查找范围”列表中选取PISTON.PRT零件,然后单击
,系统弹出图9.5.73所示的“搜索工具”对话框;在“查找”列表中选取“基准平面”,在“查找范围”列表中选取PISTON.PRT零件,然后单击 按钮;在结果列表中选取基准平面ZERO_REF,并单击
按钮;在结果列表中选取基准平面ZERO_REF,并单击 按钮将其加入选定栏中,最后单击
按钮将其加入选定栏中,最后单击 按钮。
按钮。
②指定再生值。在对话框中选中 复选框,然后在“当前位置”文本框中输入距离值76.0,再单击
复选框,然后在“当前位置”文本框中输入距离值76.0,再单击 按钮,将该值设置为再生值,如图9.5.70所示。
按钮,将该值设置为再生值,如图9.5.70所示。
③指定限制值。在对话框中选中 复选框,并在其后的文本框中输入距离值0.0;选中
复选框,并在其后的文本框中输入距离值0.0;选中 ,并在其后的文本框中输入距离值76.0,这样就限定了该运动轴的运动范围。
,并在其后的文本框中输入距离值76.0,这样就限定了该运动轴的运动范围。
④单击对话框中的 按钮。
按钮。
Step3.验证:单击 功能选项卡
功能选项卡 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,拖移驱动杆子装配(actuating_rod_asm.asm),可验证所定义的运动轴极限。如果装配失败,请尝试将再生值改为-76.00、最大极限改为0.0、最小极限改为-76.0。
,拖移驱动杆子装配(actuating_rod_asm.asm),可验证所定义的运动轴极限。如果装配失败,请尝试将再生值改为-76.00、最大极限改为0.0、最小极限改为-76.0。
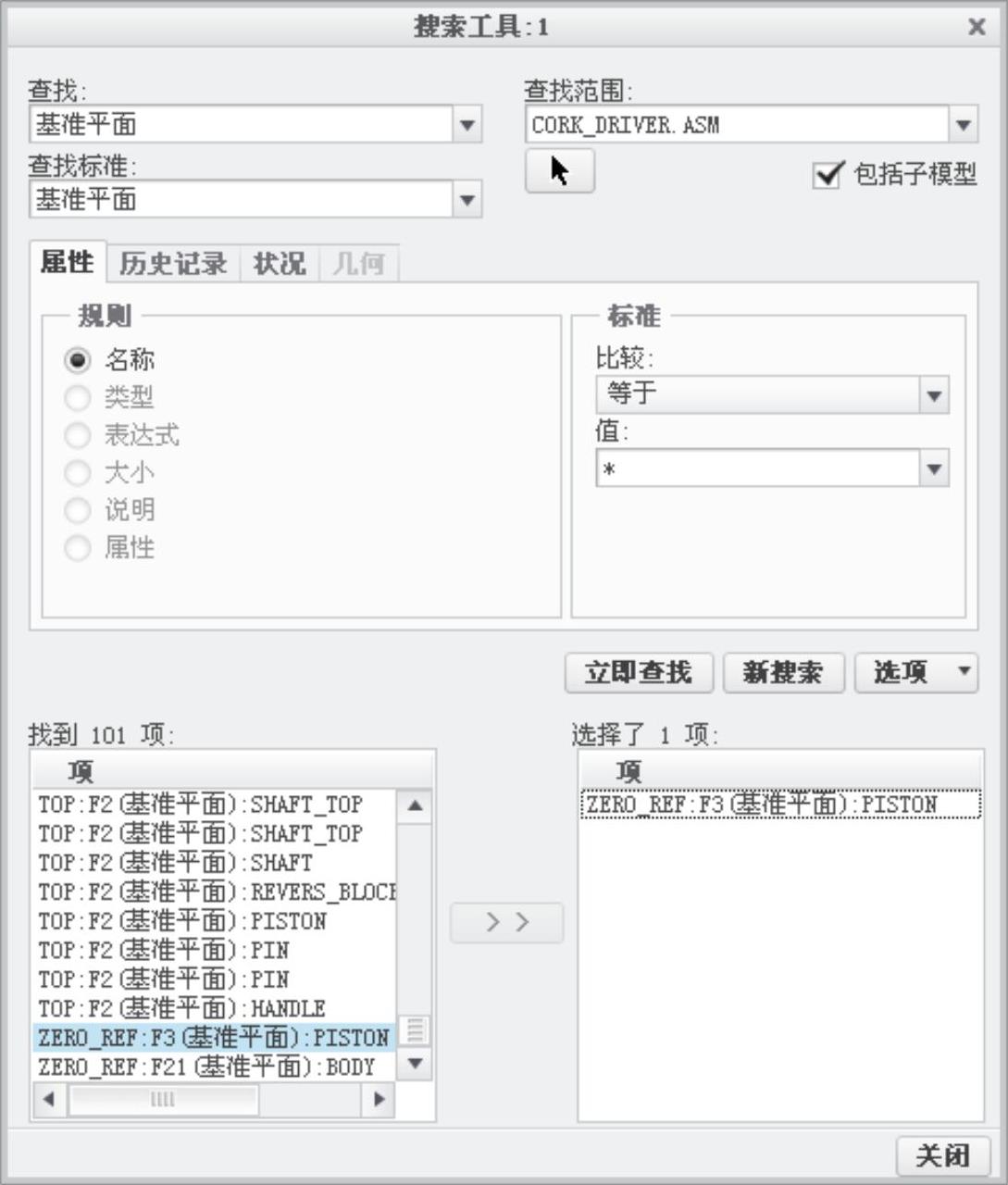
图9.5.73 “搜索工具”对话框
Stage2.第二个运动轴设置
Step1.单击 功能选项卡
功能选项卡 区域中的“查找”按钮
区域中的“查找”按钮 ,查找并选取运动轴“Connection_4c.first_trans_axis_”。
,查找并选取运动轴“Connection_4c.first_trans_axis_”。
Step2.右击,在弹出的快捷菜单中选择 命令,系统弹出“运动轴”对话框,在该对话框中进行下列操作:
命令,系统弹出“运动轴”对话框,在该对话框中进行下列操作:
(1)在连接件和组件上选取零参考。选取图9.5.74所示止动杆(Stop_Rod)零件中的端面,以及图9.5.75所示机体(Body)零件中的端面,则选取的参考自动显示在图9.5.76所示的“运动轴”对话框中。
(2)指定再生值。在对话框中选中 复选框,采用默认的再生值5.0,如图9.5.76所示。
复选框,采用默认的再生值5.0,如图9.5.76所示。
(3)定义运动轴极限。在对话框中选中 复选框,并在其后的文本框中输入数值5.0;选中
复选框,并在其后的文本框中输入数值5.0;选中 复选框,并输入数值43.0,这样就限定了该运动轴的运动范围。
复选框,并输入数值43.0,这样就限定了该运动轴的运动范围。
(4)单击对话框中的 按钮。
按钮。
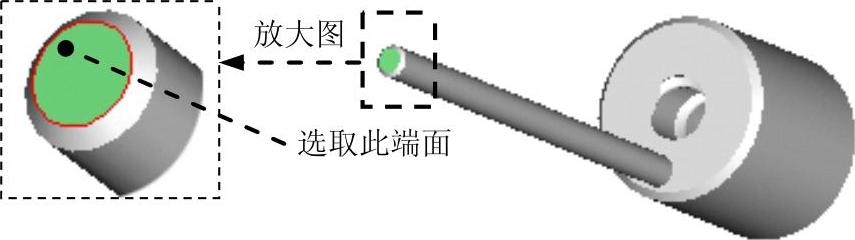
图9.5.74 选取止动杆零件的端面
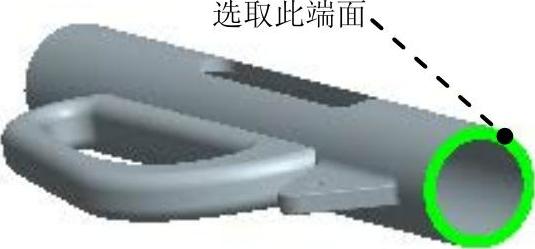
图9.5.75 选取主体机体盖的端面
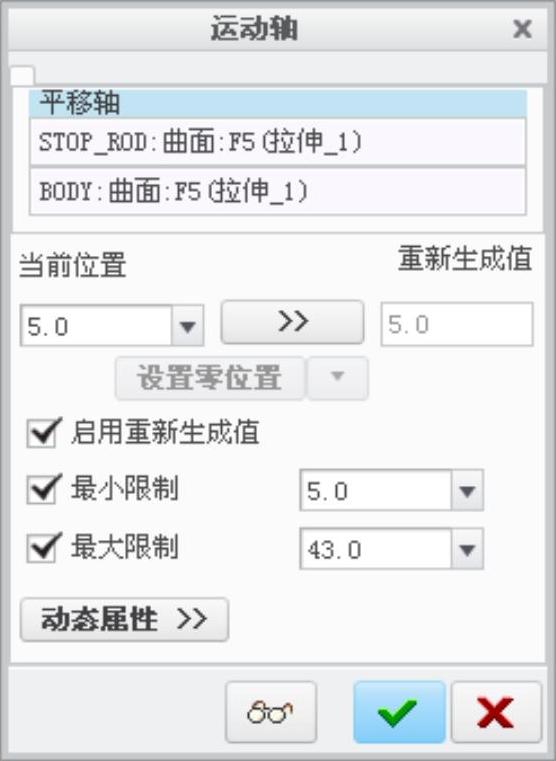
图9.5.76 “运动轴”对话框
Step3.验证:单击 功能选项卡
功能选项卡 区域中的“拖动元件”按钮
区域中的“拖动元件”按钮 ,拖移止动杆(Stop_Rod)零件,可验证所定义的极限已经起作用了。
,拖移止动杆(Stop_Rod)零件,可验证所定义的极限已经起作用了。