9.5.5 建立运动分析并运行机构
向机构装置中增加伺服电动机后,便可建立机构的运动分析(定义)并运行。
在每个运动定义中,可选择要打开或关闭的伺服电动机并指定其时间周期,以定义机构的运动方式。虽然可为一个图元定义多个伺服电动机,但一次只能打开图元的一个伺服电动机,例如为一个图元创建了一个连接轴伺服电动机和一个平面—平面旋转角度伺服电动机,则在相同的运行时间框架内不要同时打开这两个伺服电动机。
在“分析定义”对话框中,利用“锁定的图元”区域的命令按钮,可选取主体或连接进行锁定,这样当运行该运动定义时,这些锁定的主体或连接将不会相互移动。
可以创建多个运动定义,每个定义都使用不同的伺服电动机和锁定不同的图元。根据已命名的回放次序保存每个定义,便于以后查看。
下面以实例说明运行运动的一般过程。
Step1.单击 功能选项卡
功能选项卡 区域中的“机构分析”按钮
区域中的“机构分析”按钮 。
。
Step2.此时系统弹出图9.5.88所示的“分析定义”对话框,在该对话框中进行下列操作:
(1)输入此分析(即运动)的名称。在“分析定义”对话框的“名称”文本框中输入分析名称,或采用默认名。
(2)选择分析类型。选取此分析的类型为“位置”。
(3)调整伺服电动机顺序。如果机构装置中有多个伺服电动机,可单击对话框中的 选项卡,在图9.5.89所示的“电动机”选项卡中调整伺服电动机顺序。由于本例中只有一个伺服电动机,所以不必进行本步操作。
选项卡,在图9.5.89所示的“电动机”选项卡中调整伺服电动机顺序。由于本例中只有一个伺服电动机,所以不必进行本步操作。
(4)定义动画时域。在图9.5.88所示的“分析定义”对话框的 区域进行下列操作:
区域进行下列操作:
①输入开始时间:0(单位为秒)。
②选择测量时间域的方式。在该区域的下拉列表中选择 。
。
③输入终止时间:1(单位为秒)。
④输入帧频:100。
注意:
●测量时间域的方式有三种:(https://www.daowen.com)
① :输入运行的时间长度(结束时间-开始时间)和帧频(每秒帧数),系统计算总的帧数和运行长度。
:输入运行的时间长度(结束时间-开始时间)和帧频(每秒帧数),系统计算总的帧数和运行长度。
② :输入运行的时间长度和总帧数,系统计算运行的帧频和长度。
:输入运行的时间长度和总帧数,系统计算运行的帧频和长度。
③ :输入总帧数和帧频(或两帧的最小时间间隔),系统计算结束时间。
:输入总帧数和帧频(或两帧的最小时间间隔),系统计算结束时间。
●运行的时间长度、帧数、帧频和最小时间间隔的关系:
帧频=1/最小时间间隔。
帧数=帧频×时间长度+1。
(5)进行初始配置。在图9.5.88所示“分析定义”对话框的 区域,选中
区域,选中 单选项。
单选项。
注意:
●当前:以机构装置的当前位置为运行的初始位置。
●快照:从保存在“拖动”对话框中的快照列表中选择某个快照,机构装置将从该快照位置开始运行。
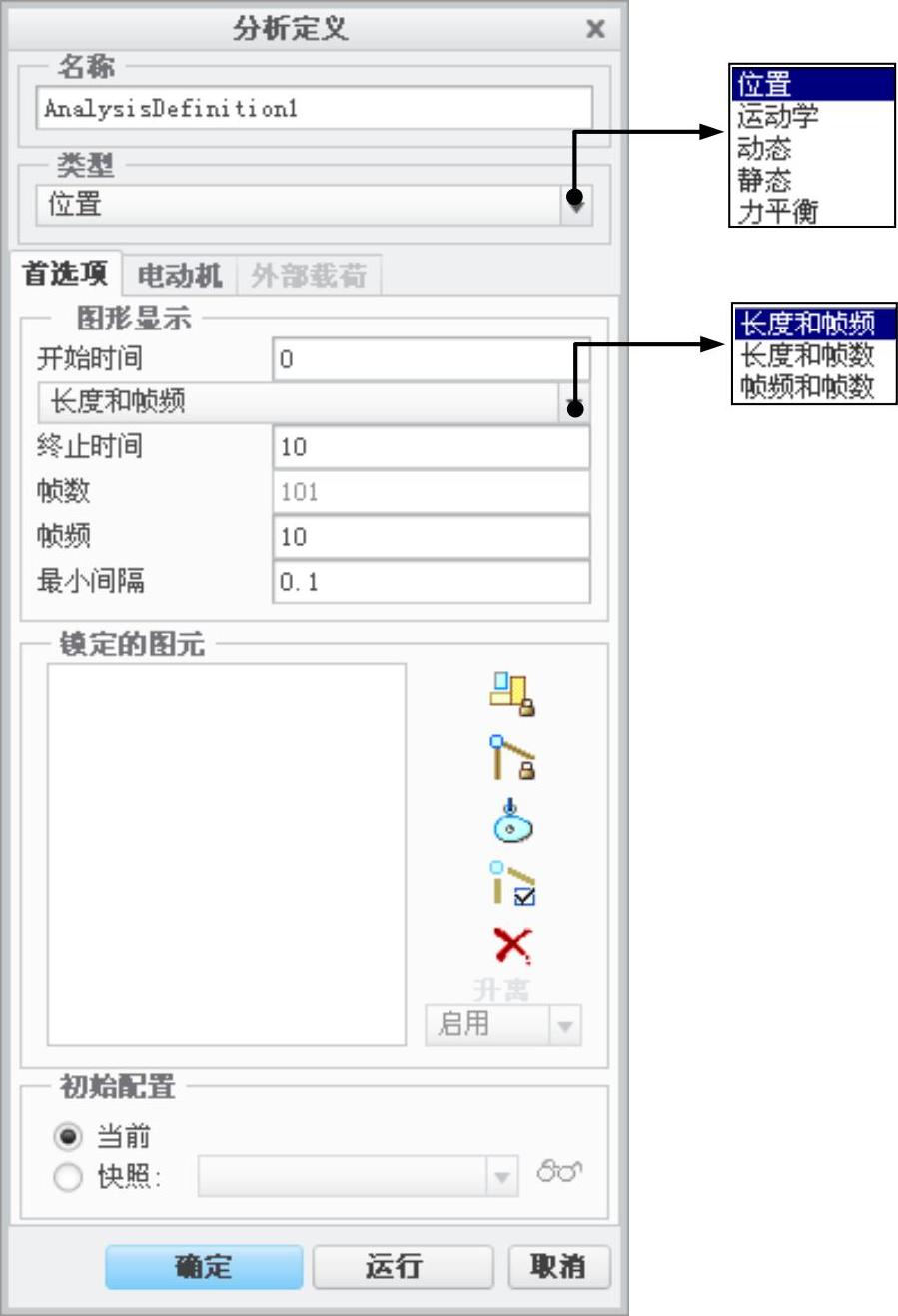
图9.5.88 “分析定义”对话框
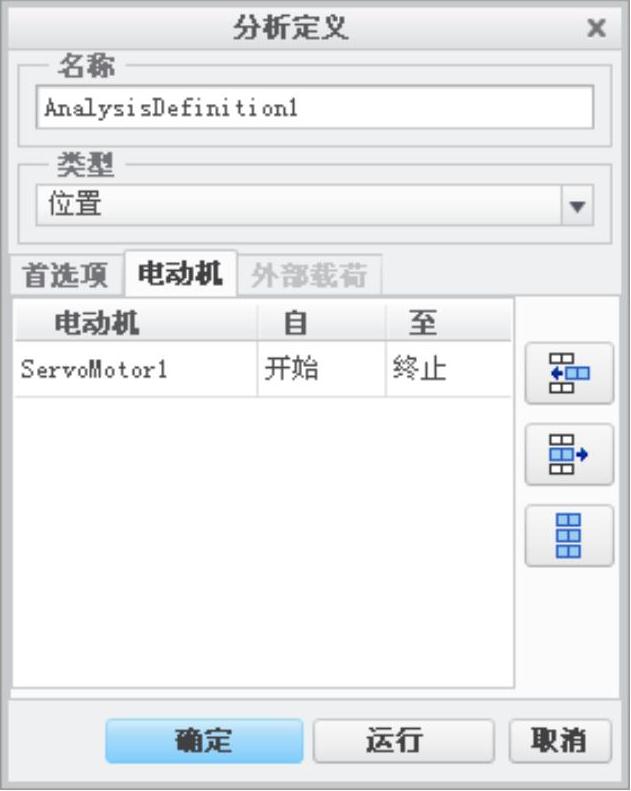
图9.5.89 “电动机”选项卡
Step3.运行运动定义。在图9.5.88所示的“分析定义”对话框中,单击 按钮。
按钮。
Step4.单击对话框中的 按钮,完成运动定义。
按钮,完成运动定义。