11.9 综合实例——机械臂装配
本例创建的机械臂装配如图11-60所示。
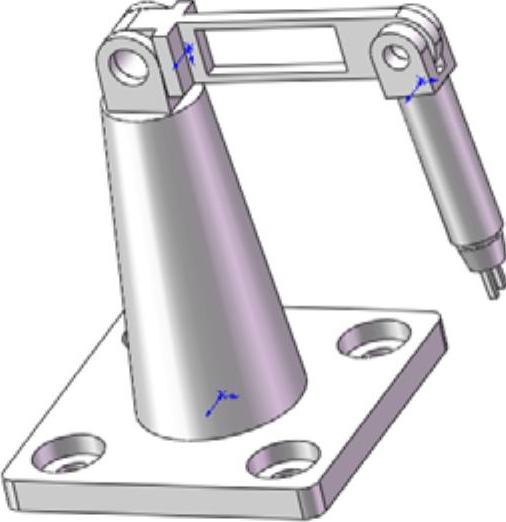
图11-60 机械臂装配
思路分析
首先导入基座定位,然后插入大臂并装配,再插入小臂并装配,最后将零件旋转到适当角度。绘制的流程图如图11-61所示。
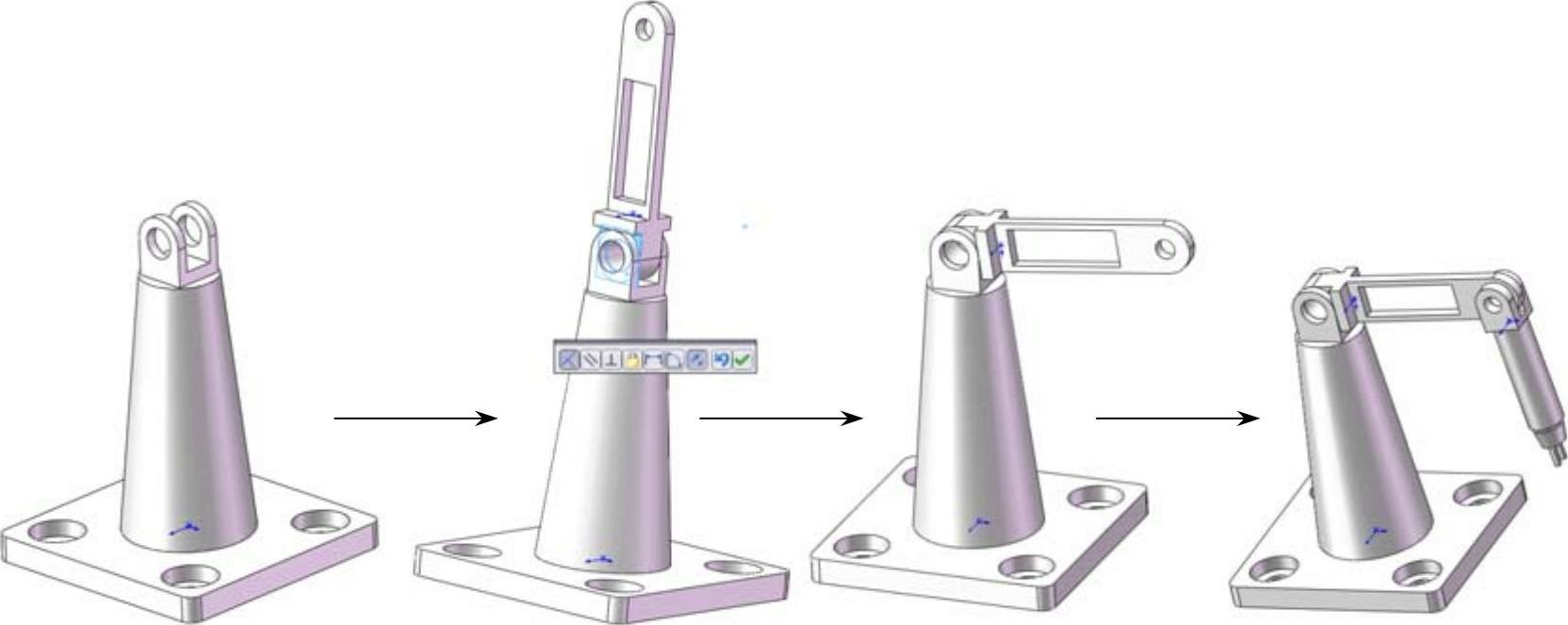
图11-61 机械臂装配绘制流程图
参见光盘
光盘\动画演示\第11章\机械臂装配.avi
(1)启动SolidWorks2012,单击“标准”工具栏中的 (新建)按钮,或执行“文件”→“新建”菜单命令,在弹出的“新建SolidWorks文件”对话框中选择
(新建)按钮,或执行“文件”→“新建”菜单命令,在弹出的“新建SolidWorks文件”对话框中选择 (装配体)按钮,如图11-62所示。然后单击“确定”按钮,创建一个新的装配文件。系统弹出“开始装配体”属性管理器,如图11-63所示。
(装配体)按钮,如图11-62所示。然后单击“确定”按钮,创建一个新的装配文件。系统弹出“开始装配体”属性管理器,如图11-63所示。
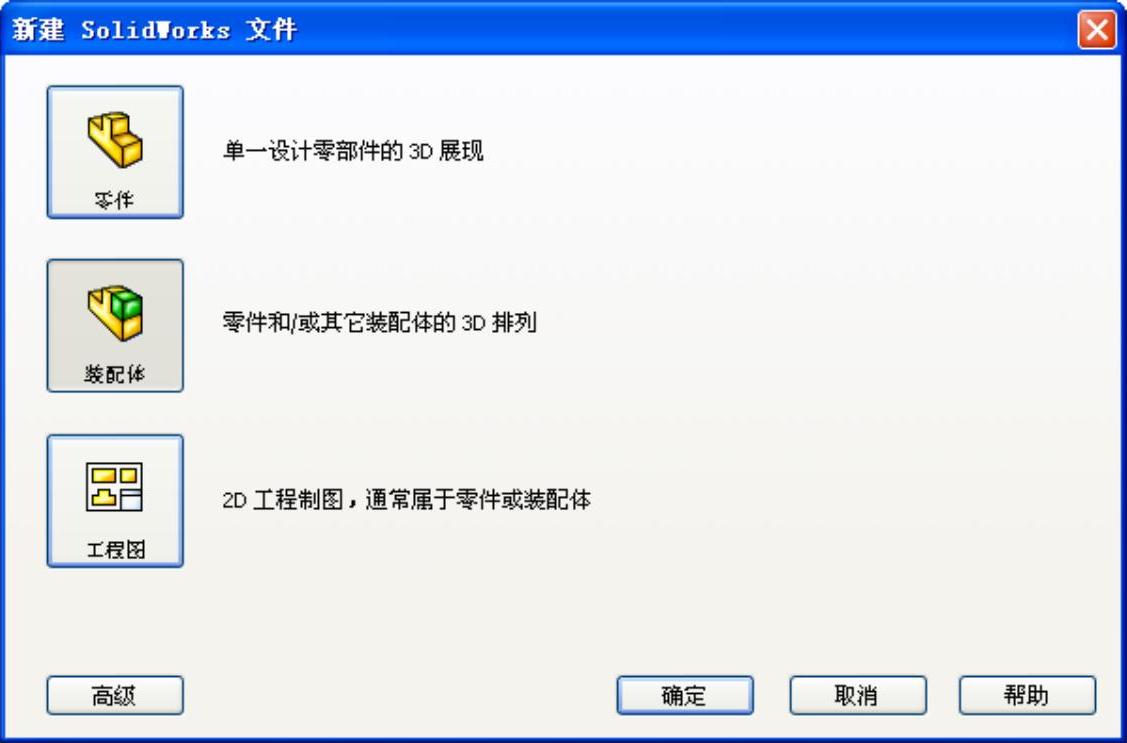
图11-62 “新建SolidWorks文件”对话框
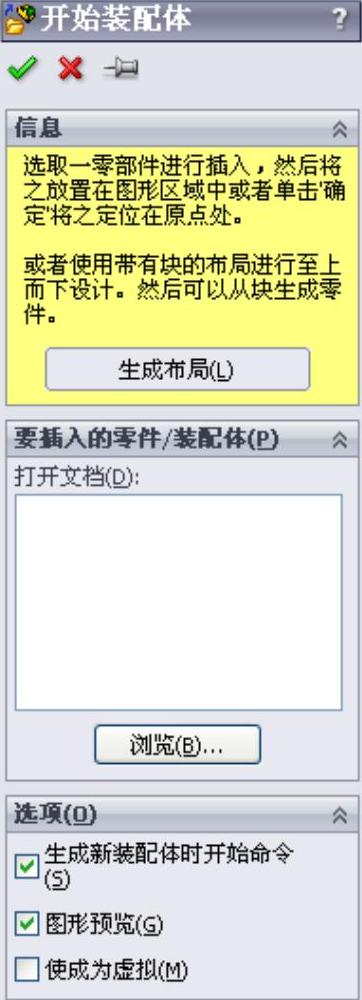
图11-63 “开始装配体”属性管理器
(2)定位基座。单击“开始装配体”属性管理器中的“浏览”按钮,系统弹出“打开”对话框,选择已创建的“基座”零件,这时对话框的浏览区中将显示零件的预览结果,如图11-64所示。在“打开”对话框中单击“打开”按钮,系统进入装配界面,光标变为 形状,选择菜单栏中的“视图”→“原点”命令,显示坐标原点,将光标移动至原点位置,光标变为
形状,选择菜单栏中的“视图”→“原点”命令,显示坐标原点,将光标移动至原点位置,光标变为 形状,如图11-65所示,在目标位置单击将基座放入装配界面中,如图11-66所示。
形状,如图11-65所示,在目标位置单击将基座放入装配界面中,如图11-66所示。
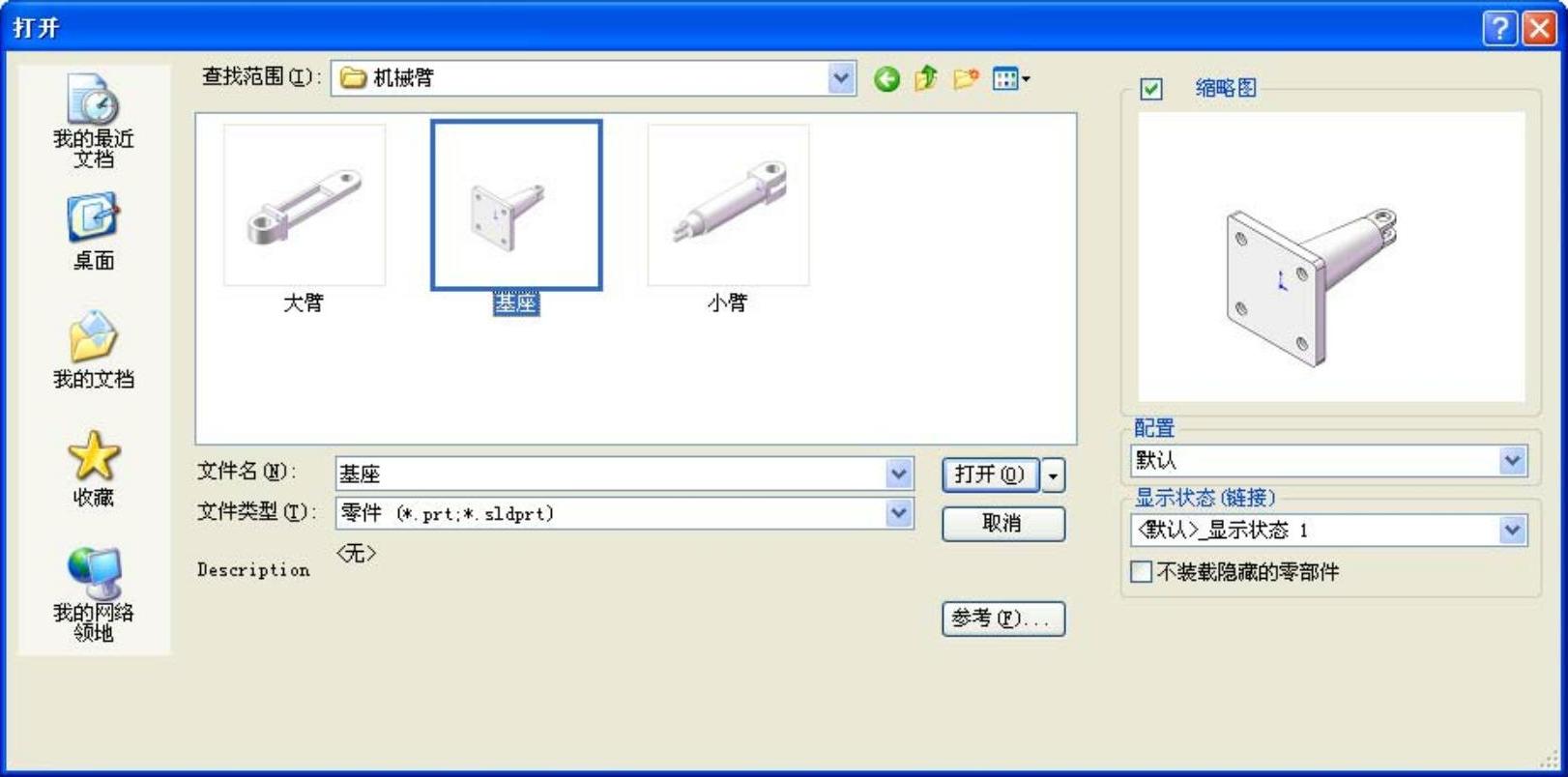
图11-64 “打开”对话框
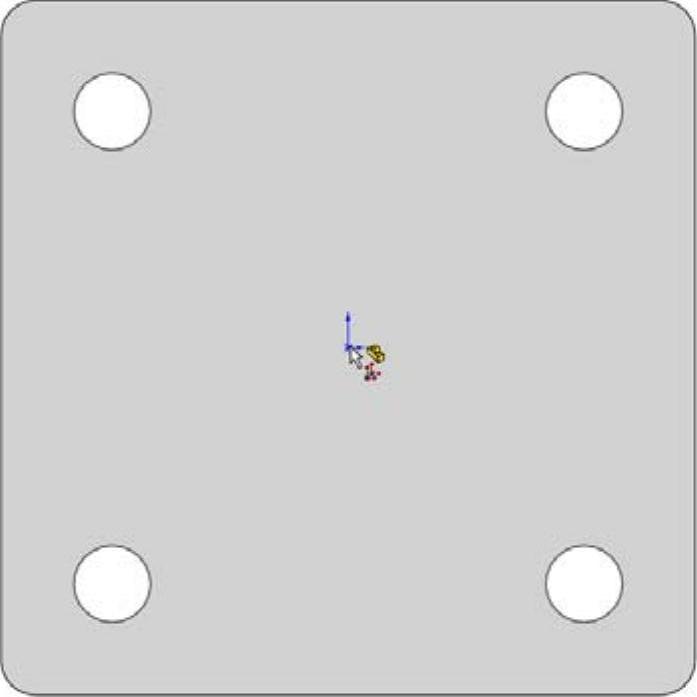
图11-65 定位原点
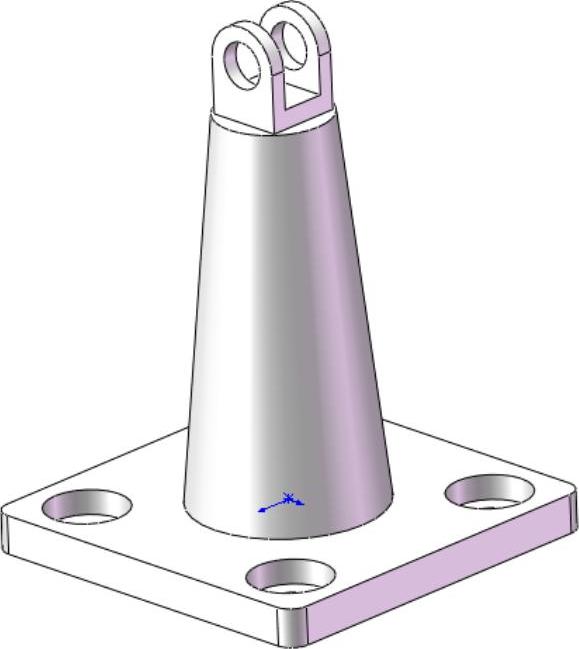
图11-66 插入基座(https://www.daowen.com)
(3)插入大臂。选择菜单栏中的“插入”→“零部件”→“现有零件/装配体”命令,或单击“装配体”工具栏中的 (插入零部件)按钮,弹出如图11-67所示“插入零部件”属性管理器,单击“浏览”按钮,在弹出的“打开”对话框中选择“大臂”,将其插入到装配界面中,如图11-68所示。
(插入零部件)按钮,弹出如图11-67所示“插入零部件”属性管理器,单击“浏览”按钮,在弹出的“打开”对话框中选择“大臂”,将其插入到装配界面中,如图11-68所示。
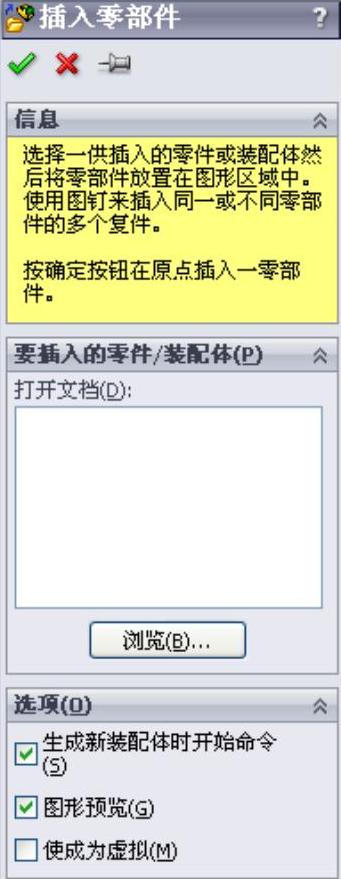
图11-67 “插入零部件”属性管理器
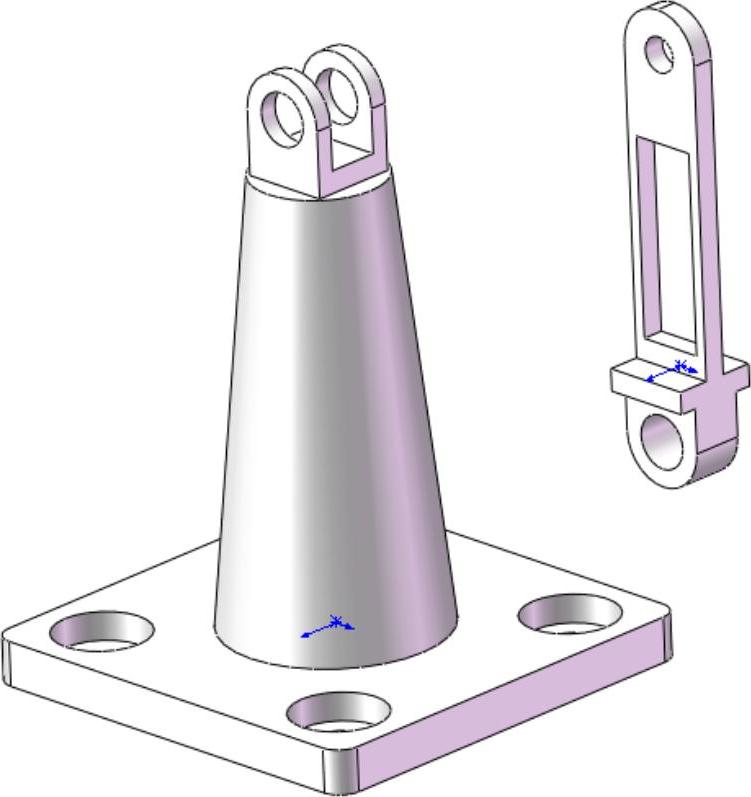
图11-68 插入大臂
(4)添加装配关系。选择菜单栏中的“插入”→“配合”命令,或单击“装配体”工具栏中的 (配合)按钮,系统弹出“配合”属性管理器,如图11-69所示。选择图11-70所示的配合面,在“配合”属性管理器中单击
(配合)按钮,系统弹出“配合”属性管理器,如图11-69所示。选择图11-70所示的配合面,在“配合”属性管理器中单击 (同轴心)按钮,添加“同轴心”关系,单击
(同轴心)按钮,添加“同轴心”关系,单击 (确定)按钮。选择如图所示的配合面,在“配合”属性管理器中单击
(确定)按钮。选择如图所示的配合面,在“配合”属性管理器中单击 (重合)按钮,添加“重合”关系,单击
(重合)按钮,添加“重合”关系,单击 (确定)按钮,拖动大臂旋转到适当位置,如图11-71所示。
(确定)按钮,拖动大臂旋转到适当位置,如图11-71所示。

图11-69 “配合”属性管理器
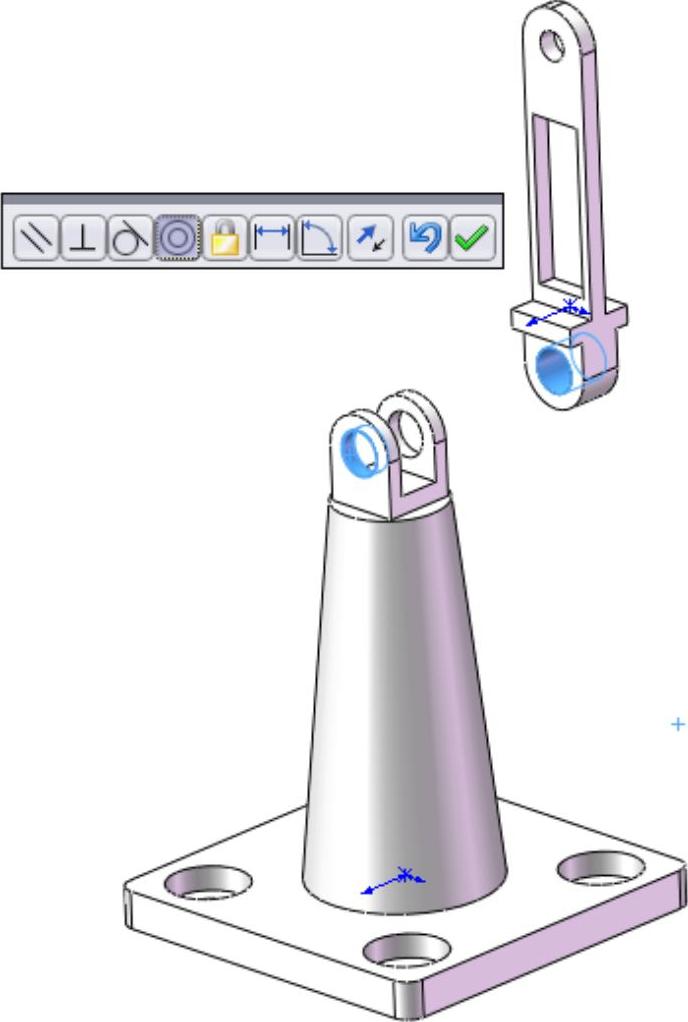
图11-70 选择配合面
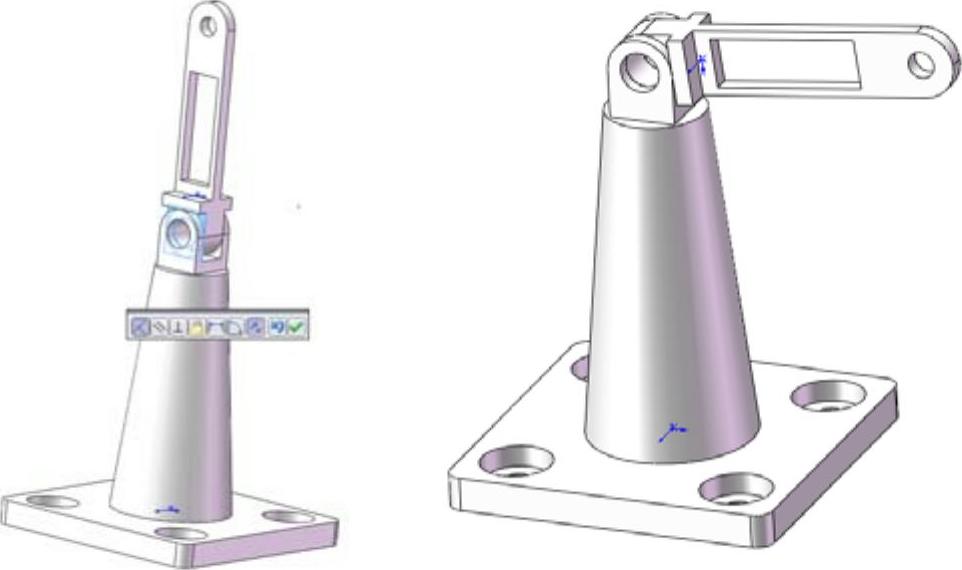
图11-71 拖动大臂旋转到适当位置
(5)插入小臂。选择菜单栏中的“插入”→“零部件”→“现有零件/装配体”命令,或单击“装配体”工具栏中的 (插入零部件)按钮,弹出“插入零部件”属性管理器,单击“浏览”按钮,在弹出的“打开”对话框中选择“小臂”,将其插入到装配界面中,如图11-72所示。
(插入零部件)按钮,弹出“插入零部件”属性管理器,单击“浏览”按钮,在弹出的“打开”对话框中选择“小臂”,将其插入到装配界面中,如图11-72所示。
(6)添加装配关系。选择菜单栏中的“插入”→“配合”命令,或单击“装配体”工具栏中的 (配合)按钮,系统弹出“配合”属性管理器。选择图11-73所示的配合面,在“配合”属性管理器中单击
(配合)按钮,系统弹出“配合”属性管理器。选择图11-73所示的配合面,在“配合”属性管理器中单击 (同轴心)按钮,添加“同轴心”关系,单击
(同轴心)按钮,添加“同轴心”关系,单击 (确定)按钮。选择如图11-74所示的配合面,在“配合”属性管理器中单击
(确定)按钮。选择如图11-74所示的配合面,在“配合”属性管理器中单击 (重合)按钮,添加“重合”关系,单击
(重合)按钮,添加“重合”关系,单击 (确定)按钮,拖动小臂旋转到适当位置,如图11-75所示。
(确定)按钮,拖动小臂旋转到适当位置,如图11-75所示。
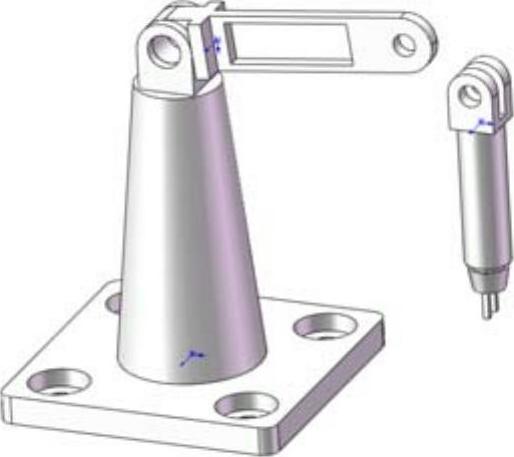
图11-72 插入小臂

图11-73 选择配合面1
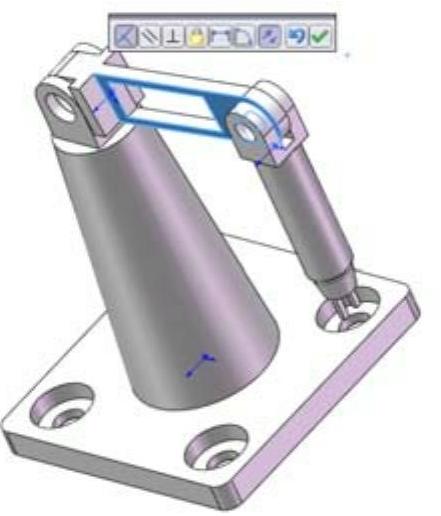
图11-74 选择配合面2
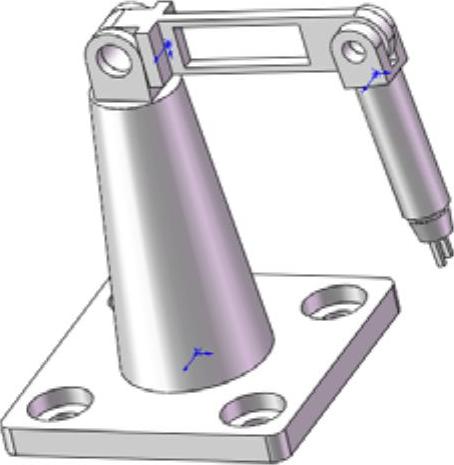
图11-75 配合结果