13.2 仿真模型
同结构分析相似,仿真模型是在主模型的基础上创建的,两者之间存在密切联系。
(1)依次单击“应用模块”选项卡→“仿真”组→“运动”图标 ,进入运动分析模块。
,进入运动分析模块。
(2)单击绘图窗口左侧的“运动导航器”图标 ,弹出“运动导航器”,如图13-1所示。
,弹出“运动导航器”,如图13-1所示。

图13-1 运动导航器
(3)右键单击运动导航器中的主模型名称,在弹出的快捷菜单中选择“新建仿真”命令,弹出如图13-2所示的“环境”对话框,单击“确定”按钮。
(4)弹出如图13-3所示的“机构运动副向导”对话框,单击“取消”按钮,创建默认名为“motion_1”的运动仿真文件。
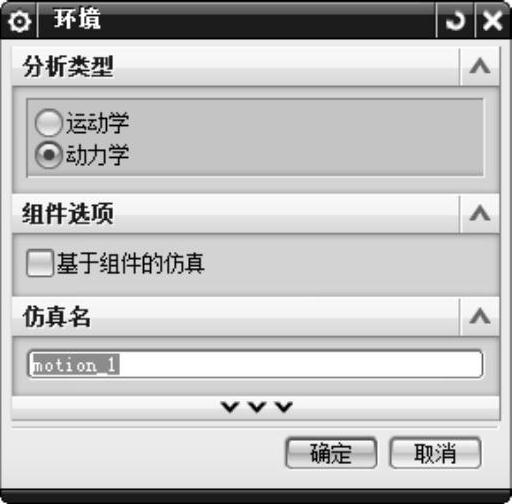
图13-2 “环境”对话框
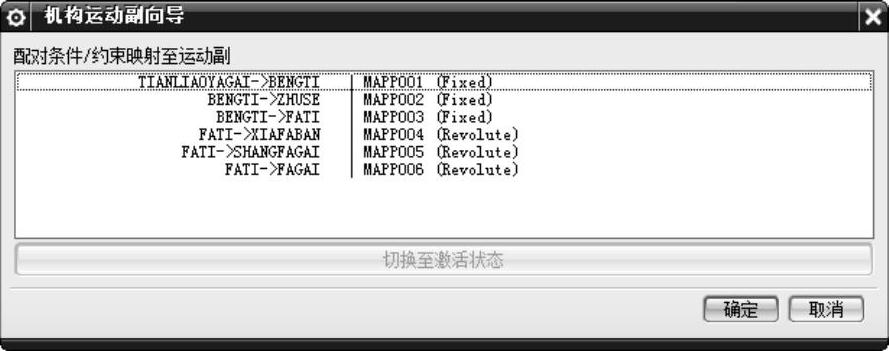
图13-3 “机构运动副向导”对话框
(5)右键单击该文件名,弹出如图13-4所示的快捷菜单,用户可以对仿真模型进行多项操作。快捷菜单中各命令的含义如下。
●重命名:给运动分析方案分配一个新的名字,系统默认名称为motion_1。
●删除:删除一个运动分析方案。
●克隆:克隆操作创建一个新的分析方案及其装配文件,该分析方案引用激活工作的分析方案和装配文件作为初始分析文件和装配文件。
●新建连杆:在模型中创建连杆,通过“创建连杆”对话框可以为连杆赋予质量特性、转动惯量等,在第14章会详细介绍相关操作过程。
●新建运动副:在模型中的接触连杆间定义运动副,包括旋转副、滑动副、球面副等。
●新建连接器/载荷:为机构各连杆定义力学对象,包括标量力、力矩、矢量力、力矩和弹簧副、阻尼等。
●新建标记:通过在连杆产生标记点,可方便地为分析结果产生该点接触力、位移、速度。
●新建传动副:为模型中定义传动对,包括齿轮副、齿条副和线缆副。
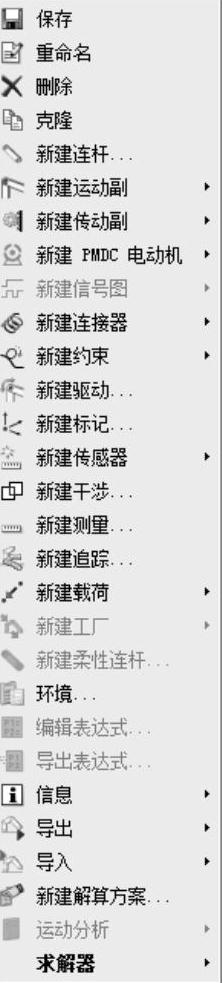
图13-4 快捷菜单
●新建约束:为模型定义高低副,包括点线副、线线副和点面副。
●环境:为运动分析定义解算器,包括运动学和动态两种解算器。
●编辑表达式:修改模型中存在的表达式。
●导出表达式:将当前仿真模型中的表达式修改值输出到主模型,对主模型进行修改。
●信息:供用户查看仿真模型中的信息,包括运动连接信息和在Scenario模型修改表达式的信息。
●导出:输出机构分析结果,以供其他系统调用。
●运动分析:对设置好的仿真模型进行求解分析。
●求解器:选择分析求解的运算器,包括Recurdyn和Adams。