13.4.1 连杆
2025年09月21日
13.4.1 连杆
在通常的机构学中,固定的部分称为机架。而在运动仿真分析模块中,固定的零件和发生运动的零件都统称为连杆。在创建连杆中,用户应注意一个几何对象只能创建一个连杆,而不能创建多个连杆。
选择“菜单”→“插入”→“链接”命令,或依次单击“主页”选项卡→“连杆”组→“连杆”图标 ,打开如图13-8所示的“连杆”对话框。
,打开如图13-8所示的“连杆”对话框。
(1)连杆对象:选择几何体为连杆。
(2)质量和惯性:当在“质量属性选项”卷展栏的下拉列表框中选择“用户定义”选项时,该卷展栏可以为定义的杆件赋予质量并可使用点构造器定义杆件质心。
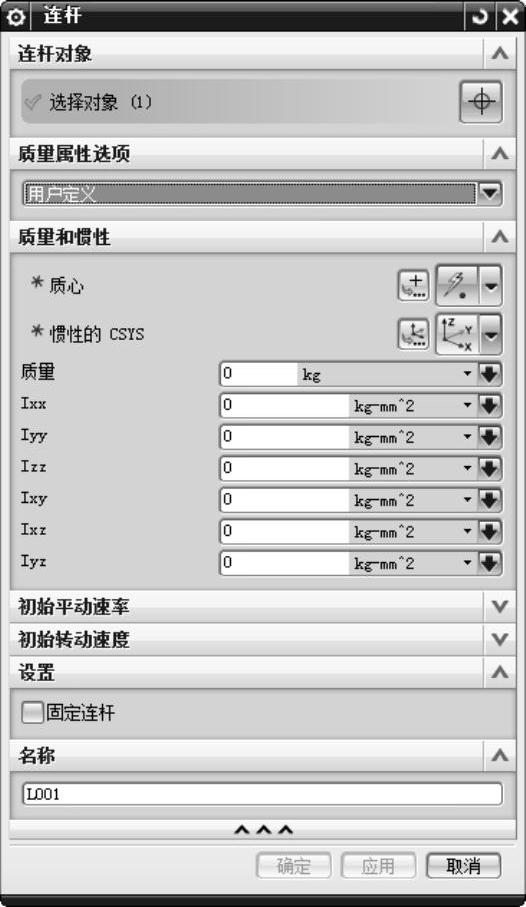
图13-8 “连杆”对话框
在定义惯性矩和惯性积前,必须先编辑坐标方向,也可以采用系统默认的坐标方向。惯性矩表达式为 ,
, ,
, ;惯性积表达式为
;惯性积表达式为 ,
, ,
, 。
。
(3)初始平动速率:为连杆定义一个初始平移速度。
●指定方向:为初始速度定义速度方向。
●平均速度:用于重新设置构件的初始平移速度。
(4)初始转动速度:为连杆定义一个初始转动速度。
●幅值,通过设置一个矢量作为角速度的旋转轴,然后在“旋转速度”文本框中输入角速度大小。
●分量:通过输入初始角速度的各坐标分量大小来设置连杆的初始角速度大小。
(5)固定连杆:勾选此复选框,选择目标零件后即为固定连杆。
注意:
若仅对机构进行运动分析,可不必为连杆赋予质量和惯性矩、惯性积参数。