13.4.2 运动副
运动副为连杆间定义的相对运动方式。不同运动副的创建对话框大致相同。
选择“菜单”→“插入”→“运动副”命令,或依次单击“主页”选项卡→“设置”组→“运动副”图标 ,打开如图13-9所示的“运动副”对话框。
,打开如图13-9所示的“运动副”对话框。
1.旋转副
(1)定义:用于设置运动副的类型和名称等。
●啮合连杆:控制由不连接杆件组成的运动副在调用机构分析解算器时产生关联关系。
●极限:控制转动副的相对转动范围,该选项只在基于位移的动态仿真中有效。同时注意在“上限”和“下限”文本框中分别输入旋转副的旋转范围数值。
(2)摩擦:为运动副提供摩擦选项,如图13-10所示。
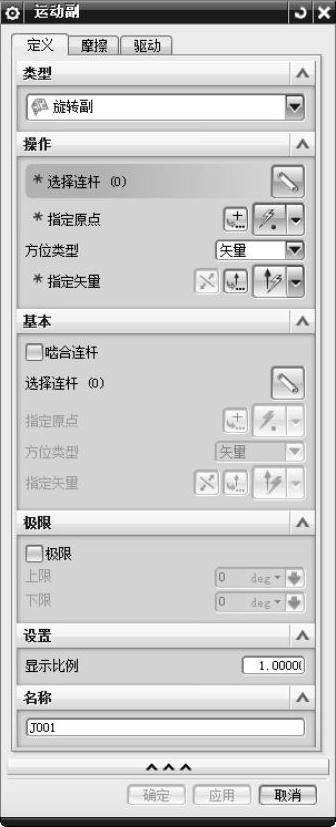
图13-9 “运动副”对话框
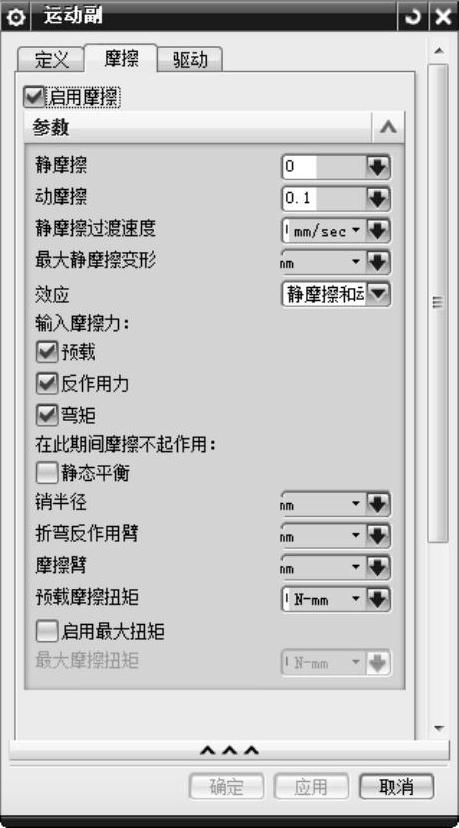
图13-10 “摩擦”选项卡
(3)驱动:控制转动副是否为原动运动副,系统为原动运动副提供四种驱动运动规律,即恒定、简谐、函数和铰接运动驱动。
●“恒定”运动规律表达式为x+v*t+1/2*a*t2,其中,x、v、a、t分别表示位移、速度、加速度和时间。在驱动类型下拉列表框中选择“恒定”,如图13-11所示。
●“简谐”运动规律表达式为A*sin(ω*t+φ)+B,其中,A、ω、φ、B、t分别表示幅值、角频率、相位角、角位移和时间。在驱动类型下拉列表框中选择“简谐”,如图13-12所示。
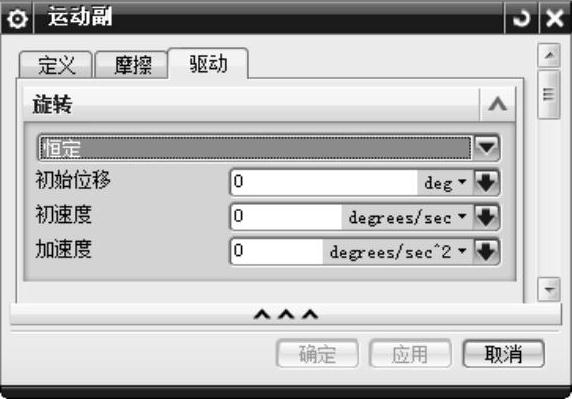
图13-11 “恒定”旋转
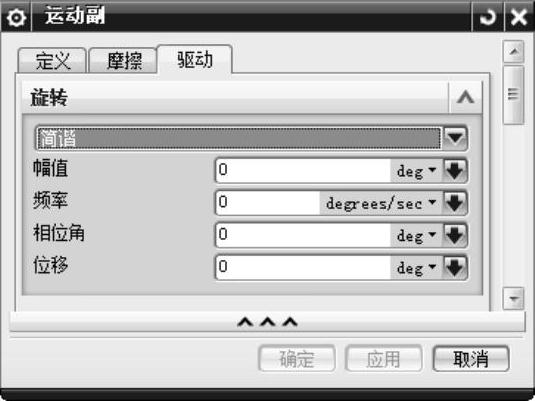
图13-12 “简谐”旋转
●“函数”由用户通过函数编辑器自定义一个表达式,在驱动类型下拉列表框中选择“函数”,如图13-13所示。
●单击图13-13所示对话框中“函数”右侧的下拉按钮并在下拉列表中选择“函数管理器”,弹出“XY函数管理器”对话框,如图13-14所示。

图13-13 “函数”对话框

图13-14 函数管理器
●“铰接运动驱动”选项用于设置基于位移的动态仿真。该运动规律选项可以设置转动副具有独立时间的运动。
2.滑块
“滑块”操作对话框和“旋转副”操作对话框相同,各选项的意义也相似,这里就不详述了。
3.柱面副
柱面副包括沿某一轴的移动副和旋转副两种传动形式,其操作对话框与上述操作对话框相比没有了“极限”和“运动驱动”选项,其他选项相同。
4.螺旋副
组成螺旋副的两个杆件沿某轴做相对移动和相对转动运动,两者间只有一个独立运动参数,但实际上不可能依靠该副单独为两个连杆生成5个约束,因此要达到施加5个约束的效果,应将螺旋副和柱面副结合起来使用。首先为两个连杆定义一个柱面副,再定义一个螺旋副,两者结合起来,才能为组成螺旋副的两个连杆定义5个约束。在螺旋副中,螺旋模数比表示输入螺旋副的螺距,其单位与主模型文件所采用的单位相同。若定义螺距为正,则第一个连杆相对于第二个连杆正向移动,若定义螺距为负,则反之。
5.万向节副
万向节副用于将轴线不重合的两个回转构件连接起来,对话框如图13-15所示。万向节的创建模型图标如图13-16所示。
图13-15 “万向节副”类型
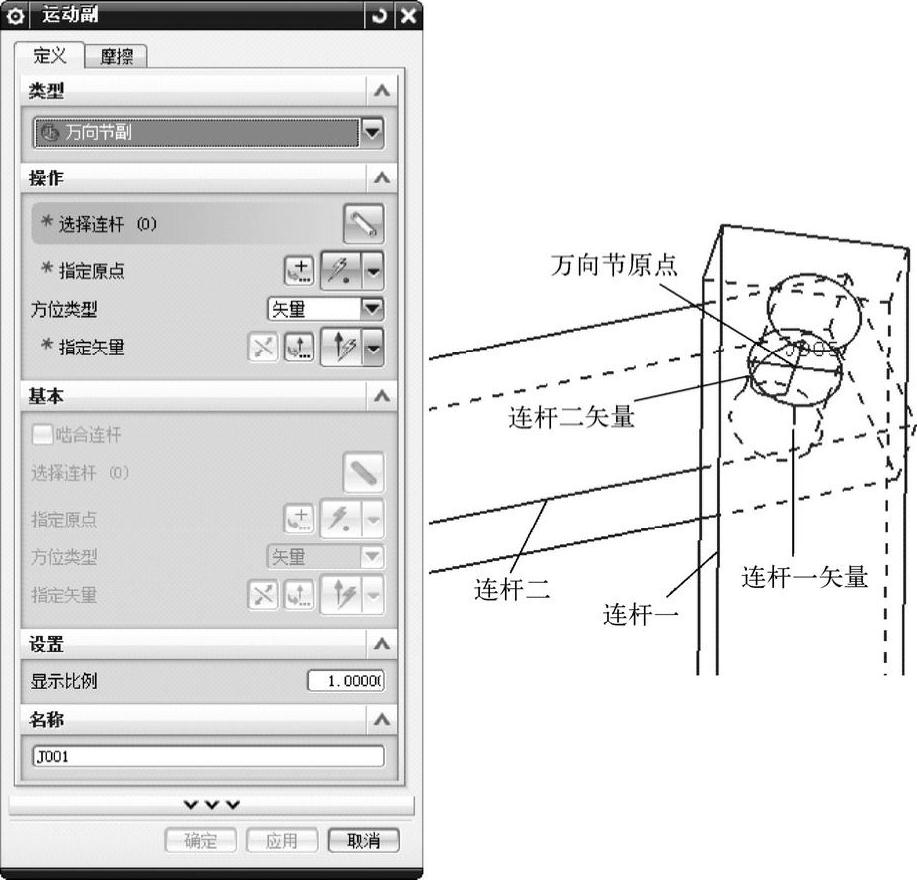
图13-16 万向节
6.球面副
组成球形副的两个连杆具有三个分别绕x,y,z轴相对旋转的自由度。组成球面副的两个连杆的坐标系原点必重合。球面副的创建模型如图13-17所示。
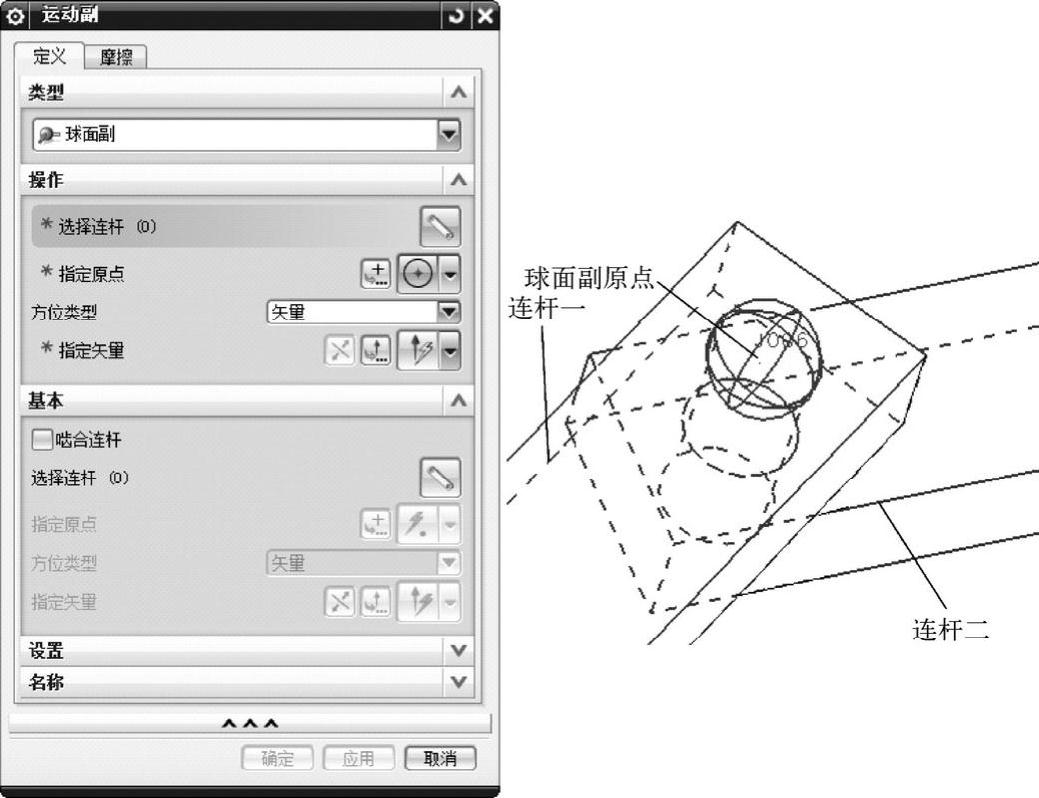
图13-17 “球面副”类型
7.平面副
平面副用于创建两个连杆的平面相对运动,包括在平面内的沿两轴向的相对移动和相对平面法向的相对转动。平面副创建模型如图13-18所示,平面矢量z轴垂直于相对移动和旋转平面。
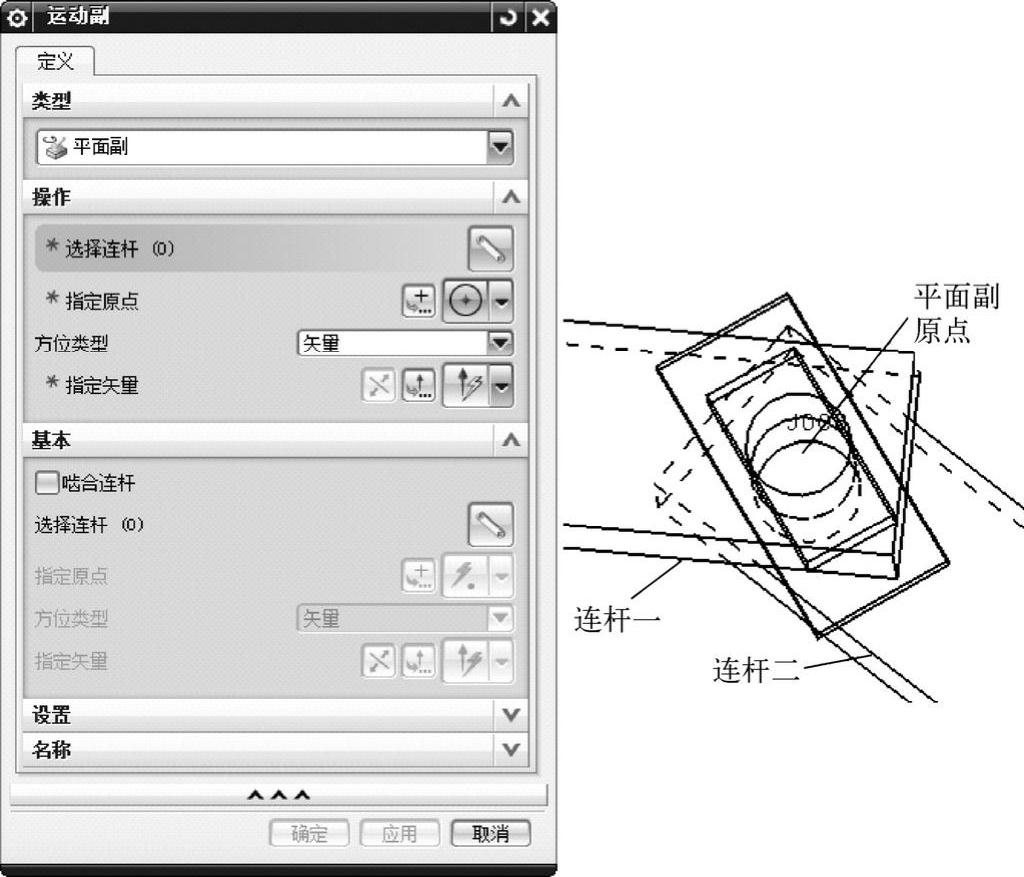
图13-18 “平面副”类型
8.固定副
在连杆间创建一个固定连接副,相当于以刚性连接两个连杆,两个连杆间无相对运动。