自动导向运输车
无人驾驶运输车负责将板料从自动仓库运到机床边的上料装置处,或者将机床上加工完的工件运送到后续工序机床处或运回仓库暂存。
无人驾驶运输车分为轨道式和自动导向式(无轨式)两种。自动导向运输车(AutomatedGuided Vehicle)简称AGV。AGV又分为有线导向和无线导向两种。
有线导向AGV又称固定路径型,它是在地面开设浅槽,槽中铺设金属线。金属线内通以低电压弱电流的低频交流信号(电流),从而在金属线周围产生磁场。运输车上装有两个感应线圈,可以检测磁场强弱以电压变化表示出来,从而控制导向电动机,使运输小车跟踪预设的由金属线导引的路径。这种导引方式具有不怕污染、金属导线不易遭破坏、便于通信和控制、停位精度高和可靠性高的优点。缺点是金属导线的铺设不仅工作量大费用高,而且改变或扩充路径比较困难,柔性差;线路附近的铁磁体可能干扰导引功能;在由多台小车构成的物流系统中,一旦一台AGV产生故障,将堵塞交通,影响其他小车工作。但目前多数仍是使用这种电磁导引的AGV。
无线导向AGV又称自由路径型。红外线导向是无线导向的一种。它是在设备上方装置反光镜。反光镜以与入射光相同的角度反射光,与雷达相似的探测器在收到来自三个不同反射镜的返回信号后,应用三角测量的方法确定其位置和方向。竖直传感器产生一个参考信号,AGV利用这一信号导向。这种自由路径型AGV不需要在地面铺设金属导线,因而特别适合于冲压车间,这是因为冲压车间地面常有金属残留物,干扰金属导线的工作。
无线导向还有以下一些方法:
1.方位推算导向法
通过检测车轮转动的角度信息,计算车体当前所处的方位,并与预先储存在计算机内的信息相比较,使小车判断出它从一个已知参考点相对运动的方位。
2.惯性导航
用陀螺仪测量加速度,对加速度进行二次积分处理,得到小车的位置偏差,从而纠正小车行驶方向。也有用磁罗盘导航的。(https://www.daowen.com)
3.环境映射
通过对周围环境的光学或超声波映射,小车周期性地产生它周围环境的当前映像,并将其与存储在存储器内的映像进行比较,以此判断小车位置。
有线导向运输车的控制系统由地面控制器和车上的微机组成。地面控制器是运输车的主控制机与每台运输车的连接设备。它可以产生导向频率为运输车导向;同时它负责处理主控制机和运输车之间的通信;跟踪每台运输车,检测误差,提供补偿和经常控制地面设备。运输车上的微机功能如下:为运输车导向;在上下料工位上停位;加速和减速;检查电池状态;检测负荷和执行安全规程等。
自动导向运输车的结构见如图6-7-2所示。
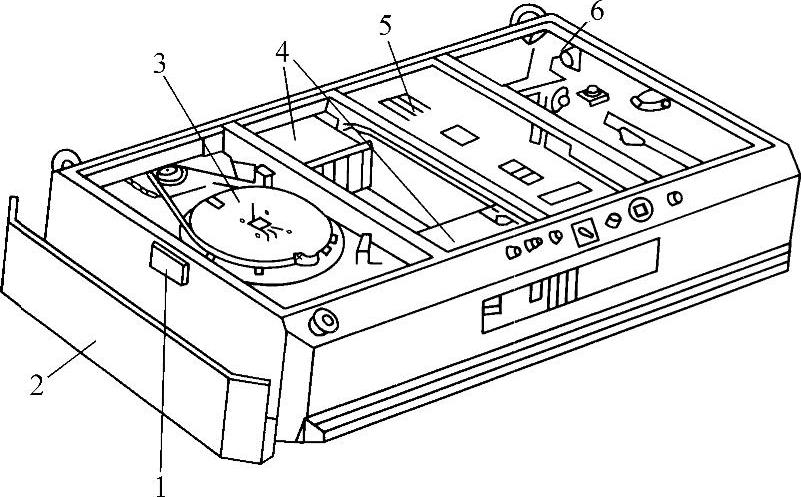
图6-7-2 自动导向运输车结构简图
1—距离接受机 2—安全缓冲挡板 3—转向部件 4—电池 5—微型计算机 6—充电装置