关节型机器人的手臂及机身结构
关节型机器人的手臂由大臂、小臂(或多臂),以及手腕部分所组成。手臂驱动方式主要有液压驱动、气动驱动和电动驱动几种形式,并以电动形式最为通用。
图7-4-37和图7-4-38所示的PUMA—262机器人的手臂(包括大小臂和手腕)传动系统(图7-4-37)和结构布局(图7-4-38)。PUMA—262机器人基本上可以反映出关节型机器人手臂的结构特点,具有一定的概括性和代表性,本节将主要分析该机器人手臂的结构特点。
1.PUMA—262型机器人手臂及机身结构的基本形式
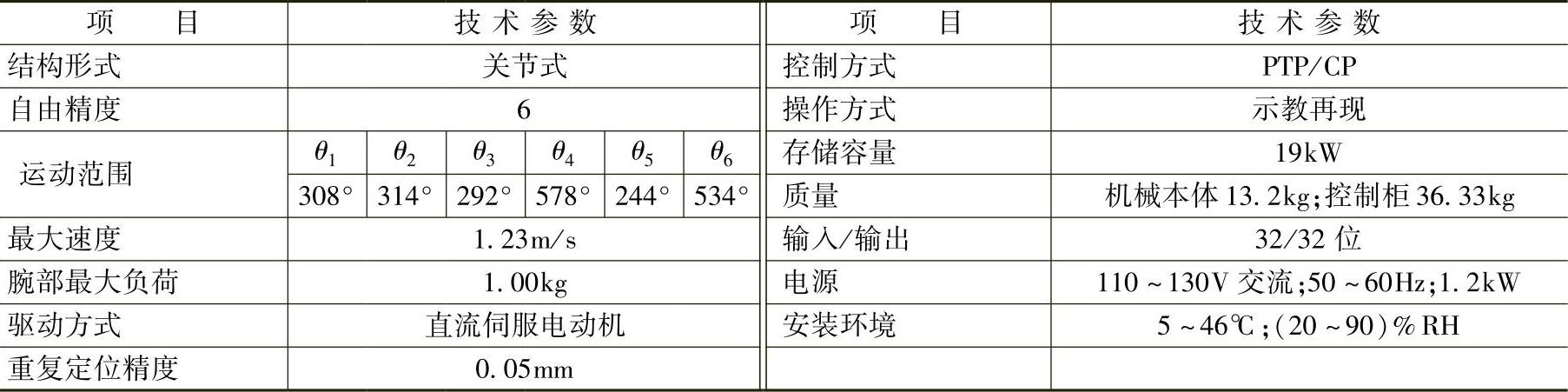
PUMA—262型机器人是美国优尼美逊公司制造的一种精密轻型关节式通用机器人。它具有6个自由度,即6个控制轴,采用直流伺服控制。它的设计具有传动精度高,结构小巧紧凑,质量轻,工作范围大,适应性广等优点,广泛应用于医药、食品、电子、机械等工业,可用来从事包装,材料配制,安装,以及小型机电元件的装配,搬运,喷涂,机器加载,试验、检查等工作。PUMA—262型机器人的主要技术参数见表7-4-2。
(1)PUMA—262型机器人结构简介 图7-4-34表示了PUMA—262的外貌,旋转轴的位置、数量,旋转角度范围以及机器人本体的主要构成部件和第1关节(腰关节)的齿轮组。它的主要构成部件是,由立柱与机座组成的回转机座(腰关节1)以及大臂、小臂、手腕等。
机座是一个铝制的整体铸件,其上装有关节1的驱动电动机,小臂定位(零位)夹板,两个控制手爪装置的气动阀、在机座内腔安置了关节1的两级直圆柱齿轮制成的减速齿轮组,即z1/z2和z3/z4。立柱为薄壁铝管制成,内部安装了关节1的回转轴及其轴承、轴承座。
大臂与小臂的结构形式相似,都由内部铝制的整体铸件骨架与外表面很薄的铝板壳(约1mm)相互胶接而成。内部铸件既作臂的承力骨架,又作内部齿轮组的轮壳与轴的支承座。
大臂上装有关节2、3的驱动电动机,内部装有对应的传动齿轮组,齿轮组传动细节可参见图7-4-39。关节2、3都采用了三级齿轮减速,其中第一级采用锥形齿轮,以改变传动方向90°。第二、三级均采用圆柱直齿轮进行减速。关节2传动的最末一个大齿轮固定在立柱上;关节3传动的最末一个大齿轮固定在小臂上。
表7-4-2 PUMA—262型机器人的主要技术参数
小臂端部连接具有3R(关节4、5、6)手腕,在臂的根部装有关节4、5的驱动电动机,在小臂的中部,靠近手腕处,装有关节6的驱动电动机(图7-4-38)。关节4、5均采用两级齿轮传动,不同的是关节4采用两级圆柱直齿轮,而关节5采用第一级圆柱直齿轮,第二级锥齿轮,使传动轴线改变方向90°。关节6采用三级齿轮传动,第一级与第二级为锥齿轮,第三级为圆柱直齿轮。关节4,5,6的齿轮组除关节4第一级齿轮装在小臂内以外,其余的均装在手腕内部。手腕外形为近似半径32mm的球体,是一个铜铸件,加工精密,安排紧凑,齿轮相互穿叉,结构严密,运转灵活,是个十分精巧的部件(图7-4-37和图7-4-39)。
(2)PUMA—262型机器人传动原理 整个传动系统共有6条传动链,每条传动链负责驱动一个关节,其总的传动系统原理图表示于图7-4-36和图7-4-37,其各传动链的主要特征归纳于表7-4-3、表7-4-4和表7-4-5。其中手腕3个自由度(即关节4、5、6)的动作原理如下。
1)关节4的动作原理。关节4(图7-4-36和图7-4-37)的功能是使手腕做横滚运动。关节4电动机的直流伺服电动机安装在小臂的后端,其输出轴先经1级齿轮减速传动z17/z18后,借联轴器和连接轴将减速后的转动再传递到第2级齿轮副z19/z20减速传动,齿轮z20具有一个大直径空心轴筒作为关节5和6的传动支撑骨架,因此齿轮z20的转动使得关节5和6随着转动,就实现了手腕做绕θ4轴线的横滚运动。
表7-4-3 各传动链特征

表7-4-4 各关节传动链
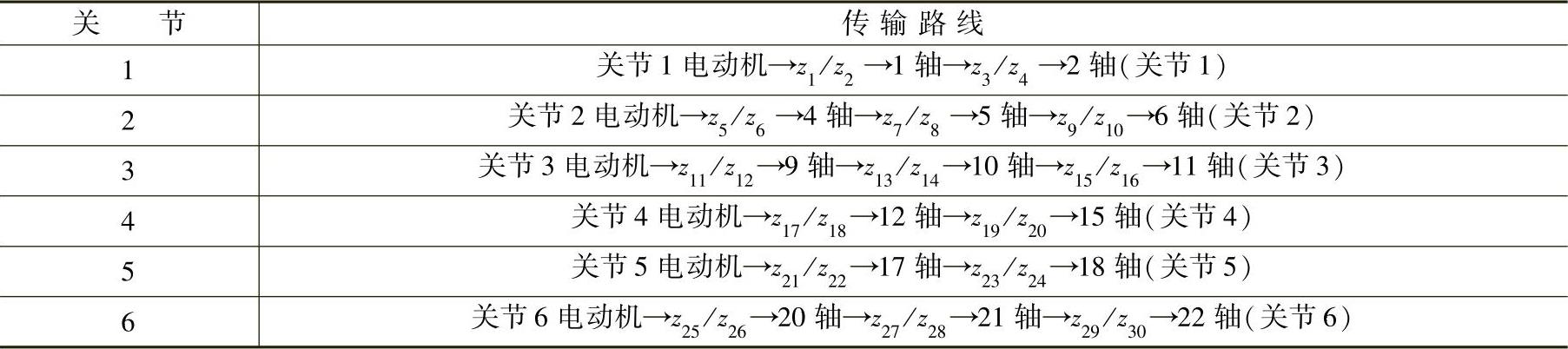
表7-4-5 各关节传动比
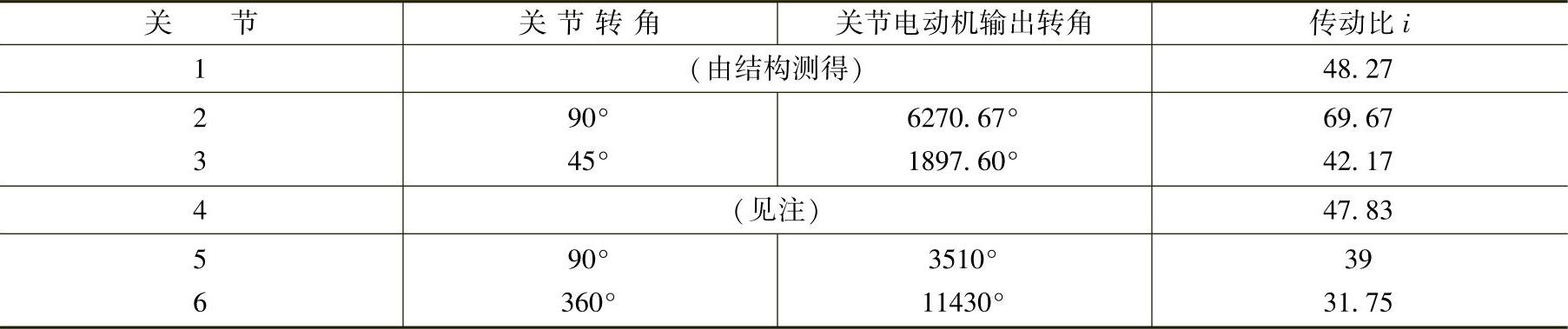
注:关节4转角90°,第一级齿轮输出12转角2130.67°,其传动比i2为第一级齿轮传动比,测试数据为i2=2130.67°/360=5.92,i1=z17/z18=105/13=8.08,所以i=i1·i2=5.92×8.08≈47.83。
2)关节5的动作原理。关节5(图7-4-37和图7-4-39)的功能是使手腕做俯仰运动。关节5的直流伺服电动机也安装在小臂的后端,其输出轴先借联轴器和连接轴将转动传递到第1级齿轮副z21/z22减速传动,齿轮z22具有一个较小直径空心轴穿过齿轮z20的大直径空心轴筒的中心轴孔进入手腕外壳内部,齿轮z22空心轴的前轴安装一圆锥齿轮z23与另一圆锥齿轮z24相啮合,做第二级减速,同时,圆锥齿轮z24与手腕壳体固装在一起,从而带动腕壳整体做绕θ5轴线的俯仰运动。
3)关节6的动作原理。关节6(图7-4-37和图7-4-39)的功能是使手腕做绕θ6轴线的回转运动。与关节4和关节5不同,关节5的直流伺服电动机安装在小臂中间靠前端位置处,因此关节6驱动距离最短,这种运动不是前面定义过的手腕侧摆运动,而且,θ6与θ4共轴线时,还会使手部空间自由度退化为5个。
(3)PUMA—262机器人本体结构特点
1)大、小臂均采用薄壁与整体骨架构成的结构形式,有利于提高刚度,减轻质量。内部铝铸件形状复杂,既用作内部齿轮安装壳体与轴的支承座,又兼作承力骨架,传递集中载荷。这样不仅节省材料,减少加工量,又使整体质量减轻。手臂外壁与铸件骨架采用胶接,使连接件减少,工艺简单,减轻了质量。
2)轴承外形环定位简单。一般在无轴向载荷处,轴承外环采用端面打冲定位的方法。
3)采用薄壁轴承与滑动铜衬套,以减少结构尺寸,减轻质量。(https://www.daowen.com)
4)有些小尺寸齿轮与轴加工成一体,减少连接件,增加了传递刚度。
5)大、小臂,手腕部结构密度大,很少有多余空隙。如电动机与臂的外壁仅有0.5mm间隙,手腕内部齿轮传动安排亦是紧密无间。这样使总的尺寸减少,质量减轻。
6)工作范围大,适应性广。PUMA—262除了自身立柱所占空间以外,它的工作空间几乎是它的手臂长度所能达到的全球空间。再加之其手腕轴的活动角度大,最大的达578°,因此使它工作时位姿的适应性很强。譬如用手腕拧螺钉,手腕关节4、6配合,一次就能转1112°。
7)由于结构上采取了刚性齿轮传动,弹性万向联轴器,工艺上加工精密,多用整体铸件,使得重复定位精度较高。
(4)机器人手臂材料的选择 机器人手臂的材料应根据手臂的工作状况来选择。根据设计要求,机器人手臂要完成各种运动。因此,对材料的一个要求是作为运动的部件,它应是轻型材料。而另一方面,手臂在运动过程中往往会产生振动,这将大大降低它的运动精度。因此,在选择材料时,需要对质量、刚度、阻尼进行综合考虑,以便有效地提高手臂的动态性能。
机器人手臂材料首先应是结构材料。手臂承受载荷时,不应有变形和断裂。从力学角度看,即要具有一定的强度。手臂材料应选择高强度材料,如钢、铸铁、合金钢等。机器人手臂是运动的,又要具有很好的受控性,因此,要求手臂比较轻。综合而言,应该优先选择强度大而密度小的材料做手臂。其中,非金属材料有尼龙6、聚乙烯(PE)和碳纤维等;金属材料以轻合金(特别是铝合金)为主。
2.关节型机器人的三自由度手腕
手腕是机器人的小臂与末端执行器(手部或称手爪)之间的连接部件,其作用是和用自身的活动度确定手部的空间姿态。故手腕也称作机器人的姿态机构。对于一般机器人而言,与手部相连接的手腕都具有独特自转的功能,若手腕能在空间取任意方位,那么与之相连的手部就可在空间取任意姿态,即达到完全灵活。可以证明,三自由度手腕能使手部取得空间任意姿态。
手腕结构是机器人中最复杂的结构,而且因传动系统互相干扰,更增加了腕结构的设计难度。对腕部的设计要求是质量轻,满足工作对手部姿态的要求,并留有一定的裕量(约5%~10%),传动系统结构简单并有利于小臂对整机的静力平衡。一般来说,由于手腕处在开式连杆系末端的特殊位置,它的尺寸和质量对操作机的动态特性和使用性能影响很大。因此,除了要求其动作灵活可靠外,还应使其结构尽可能紧凑,质量尽可能小。而在所有三自由度手腕结构中,RRR类型的三自由度手腕(图7-4-35)构造较简单,应用较普遍。
从关节的驱动方式看,手腕一般有两种形式,即远程驱动和直接驱动。直接驱动是指驱动器安装在手腕运动关节的附近,直接驱动关节运动,因而传动路线短,传动刚度好,但腕部的尺寸和质量大,惯量大。远程驱动方式的驱动器安装在机器人的大臂、基座或小臂远端上,通过连杆、链条或其他传动机构间接驱动腕部关节运动,因而手腕的结构紧凑,尺寸及质量小,对改善操作机的整体动态性能有好处,但传动设计复杂,传动刚度也降低了。
根据转动特点的不同,用于手腕关节的转动又可细分为滚转和弯转两种,如图7-4-40所示。滚转是指组成关节的两个零件,自身的几何回转中心和相对运动的回转轴线重合,因而能实现360°无障碍旋转的关节运动,通常用R来标记。弯转是指两个零件的几何回转中心和其相对转动轴线垂直的关节运动,由于受到结构的限制,相对转动角度常小于360°,通常用B来标记。
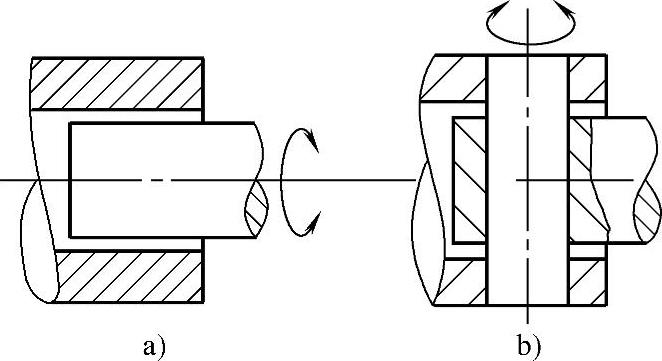
图7-4-40 手腕关节的滚转和弯转
a)滚转 b)弯转
手腕具有的滚转和弯转关节的总数,以及它们结合时排列的方式和顺序,构成了机器人操作机手腕的各种基本形式。
(1)腕部的结构和特点 为了使手部在工作空间中可以有任意的取向,腕部一般应具有3个自由度。为了特殊原因,如克服手腕自由度退化现象,也可采用多于3个自由度的手腕结构。图7-4-41列出6种3自由度手腕不同滚转和弯转结合顺序时的结构示意图。
(2)PYR手腕 手腕弯转关节有两种:①如果弯转轴线处于水平位置,则弯转运动在垂直平面内实现俯仰动作,通常称之为俯仰型弯转,简记作P;②如弯转轴线处于铅直位置,则弯转运动在水平面内实现偏摆动作,通常称为偏摆型弯转,简记为Y。
例如,对于图7-4-42所示的3自由度BBR手腕来说,它的第1个弯转关节(P)执行俯仰动作,第2个弯转关节(P)执行偏摆动作,最后一个关节则执行滚转(R),组成了PYR手腕。
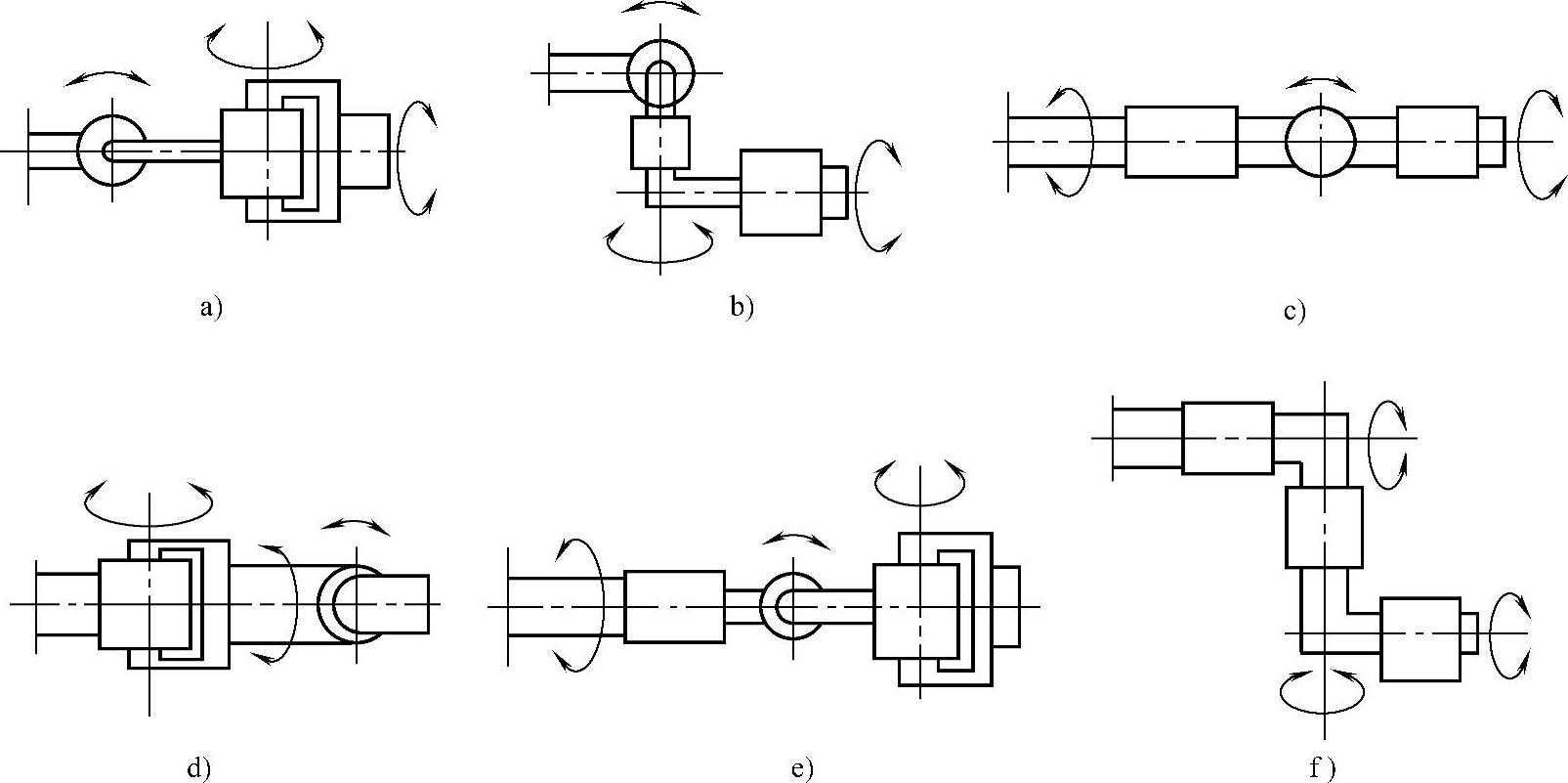
图7-4-41 6种3自由度手腕的结合方式示意
a)BBR型3自由度手腕结构 b)BRR型3自由度手腕结构 c)RBR型3自由度手腕结构 d)BRB型3自由度手腕结构 e)RBB型3自由度手腕结构 f)RRR型3自由度手腕结构
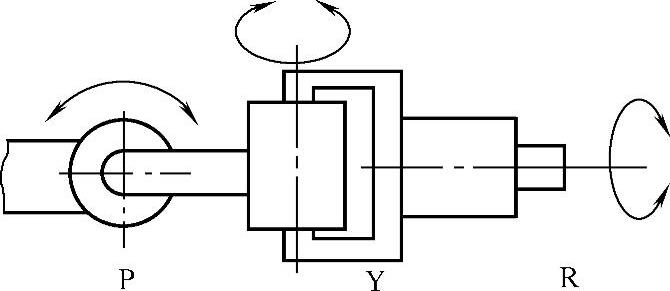
图7-4-42 PYR手腕
(3)3R手腕 3R手腕在实现远距传动时要容易一些。3R的结构如图7-4-43所示。为了实现运动的传递,3R手腕的中间关节是斜置的,三根转动轴内外套在同一转动轴线上,最外面的转动轴套直接驱动整个手腕转动,中间的轴套驱动斜置的中间关节运动,中心轴驱动第三个滚转关节。PUMA—262机器人的手腕就采用了这种远程关节传动形式。3R结构手腕的制造简单,润滑条件好,机械效率高。
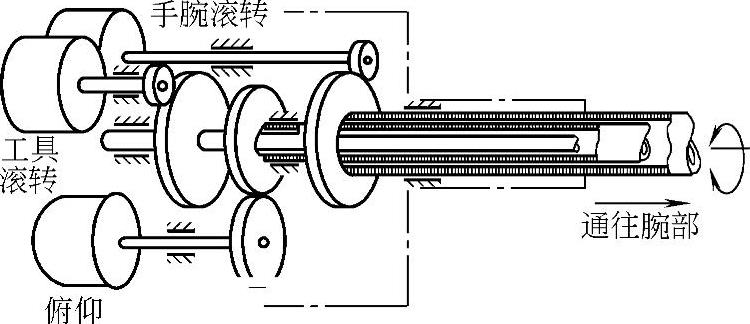
图7-4-43 3R手腕关节远程传动示意图