冲压机械手的手臂
2026年01月15日
四
、冲压机械手的手臂
手臂是支持手指和手腕及用来改变工作位置的部件,按其运动的坐标形式要求,其机构可归纳为完成伸缩、升降运动的直线运动机构和完成左右、俯仰摆动的回转运动机构两大类。
1.手臂的直线运动机构
手臂的直线运动主要有手臂的伸缩与升降。目前常用的有往复直线缸(液压缸或气缸),齿轮齿条倍增机构、升降液压缸以及直线感应电动机驱动等。
图7-4-19所示为单活塞往复直线缸,当压力油进入液压缸右腔时,推动活塞向左移动使手臂缩回;当压力油从左腔进入时,推动活塞向右移动则手臂伸出。
图7-4-20所示为机械手手臂升降用直线往复式液压缸。其结构特点是活塞行程与液压缸高度之比接近1∶1,这样液压缸不高但行程较大。为了防止手臂直线往复运动时绕本身轴线转动,活塞缸内装有导向用的花键轴,使其结构紧凑。
图7-4-20所示升降摆动液压缸除了可作直线往复运动外,还兼有摆动往复运动,适用于如图7-4-2b所示的机械手的手臂部位。
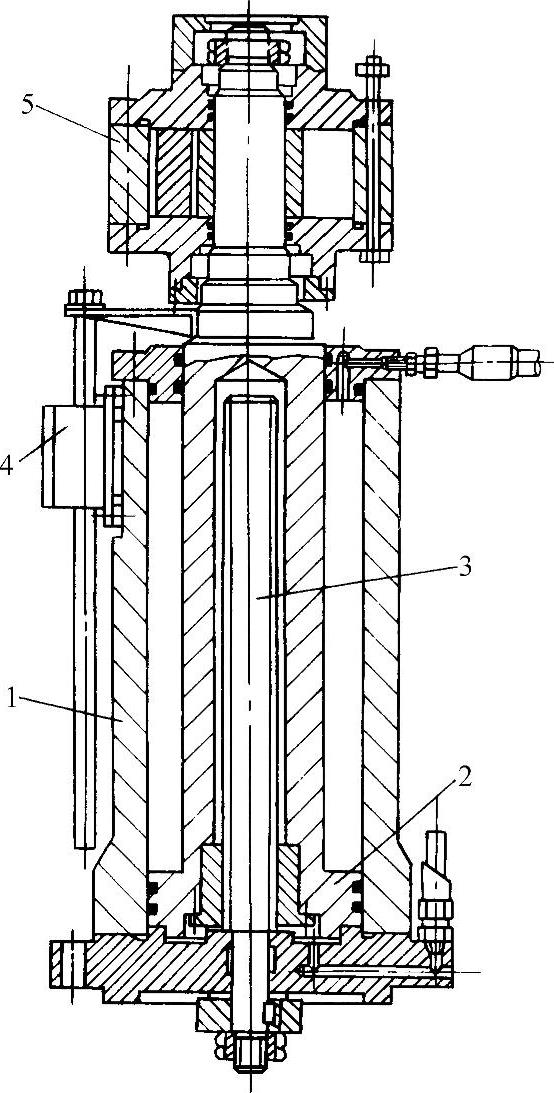
图7-4-20 升降摆动液压缸
1—升降液压缸 2—升降活塞 3—花键轴 4—行程检测器 5—摆动液压缸(https://www.daowen.com)
2.手臂的摆动运动机构
手臂的左右摆动可以通过摆动液压缸、齿条齿轮机构、链轮链条机构等来实现。
(1)叶片式摆动缸 图7-4-21所示为叶片式摆动缸的结构简图,其回转角小于360°。
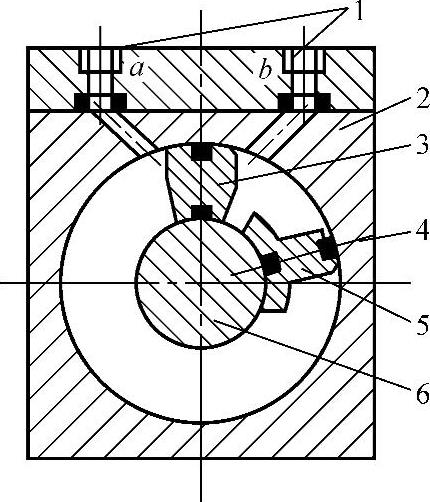
图7-4-21 叶片式摆动缸结构简图
1—油孔 2—缸体 3—定片 4—密封圈 5—动片 6—轴
(2)齿条齿轮摆动机构(见图7-4-22) 此机构是通过齿条的往复移动带动齿轮的往复回转(摆动),齿条可用油压或气动方式驱动。
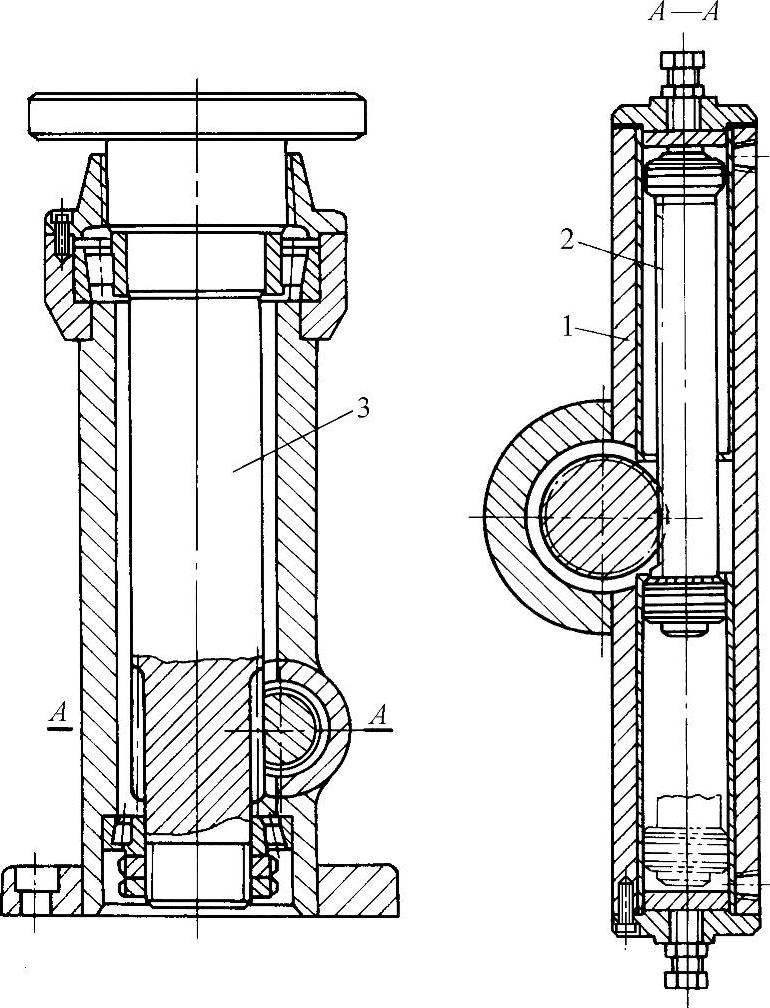
图7-4-22 驱动手臂摆动的齿条齿轮机构
1—外壳 2—活塞齿条 3—齿轮轴