锻造机械手的臂部
2026年01月15日
三
、锻造机械手的臂部
臂部是机械手的主要执行部件。其作用是:支承手部(包括锻件)和腕部,并带动它在空间运动,把锻件送到给定的位置或方位上。
1.臂部的运动形式
臂部一般有三个自由度,臂部的伸缩、左右回转、升降(或俯仰运动)。
2.臂部的典型结构
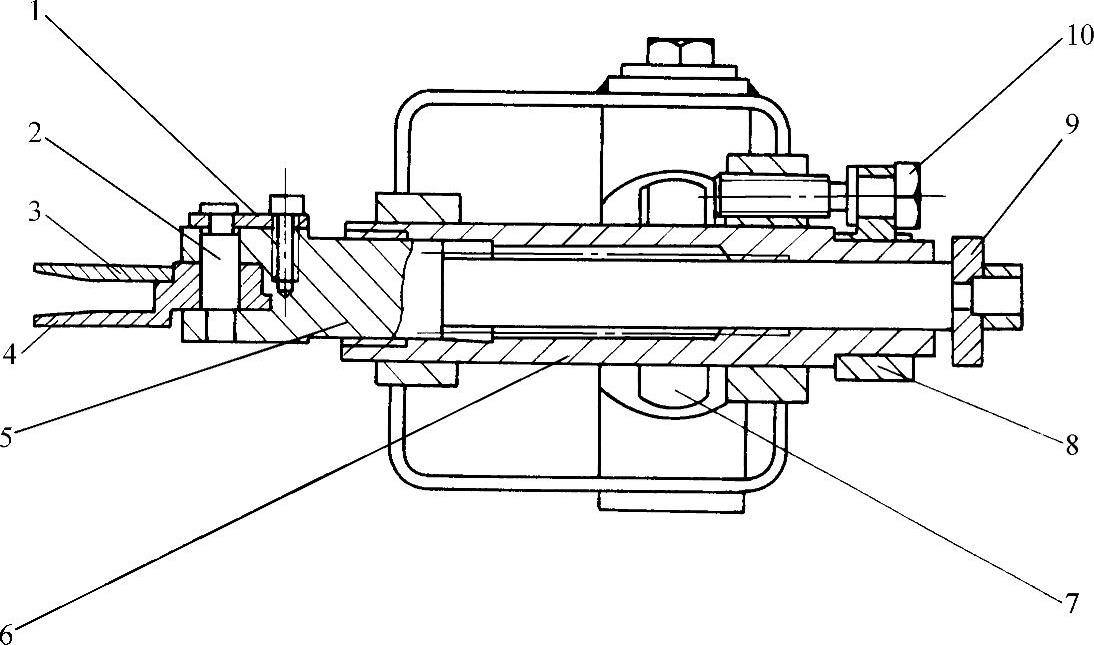
图7-3-5 步进梁机械手手部结构
1—安全销 2—销 3—定位挡块 4—V形手指 5—夹紧爪销 6—夹紧爪套 7—楔 8—调整环 9—垫片 10—螺栓
(1)采用双导向管的臂部(图7-3-11)。两根导向管4装在液压缸5的两侧,通向手部1和腕部2的油管都分布在导向管内,液压缸5安装在支承板的中间。其特点是受力均衡,可用于抓重较大,行程较长的情况。
(2)步进梁机械手臂部(见图7-3-12)。
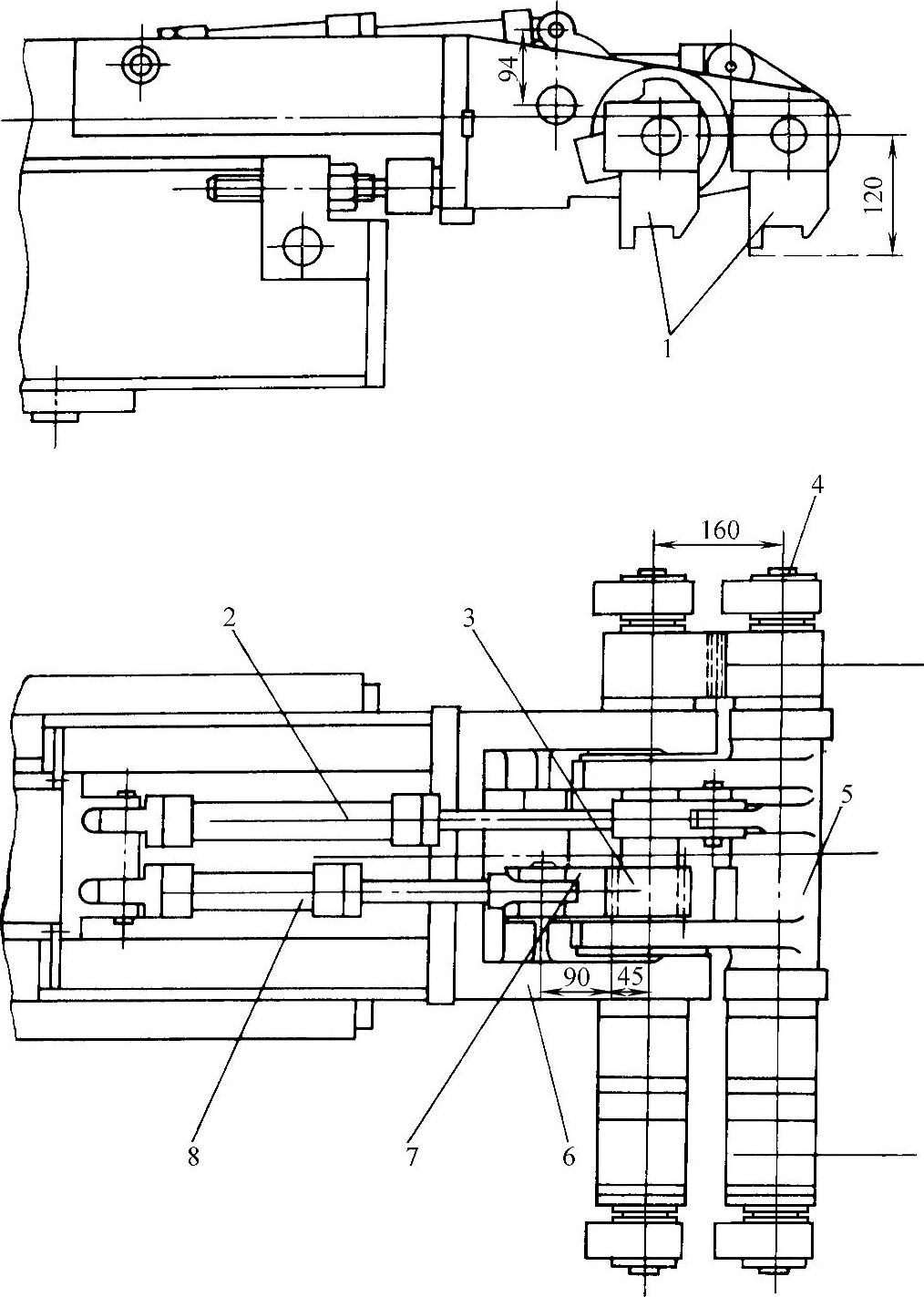
图7-3-6 16MNHVP型液压校正机械手手部结构
1—夹爪体 2—翻转液压缸 3—齿轮轴 4—轴 5—旋转头 6—夹钳头 7—扇形齿轮 8—夹紧液压缸
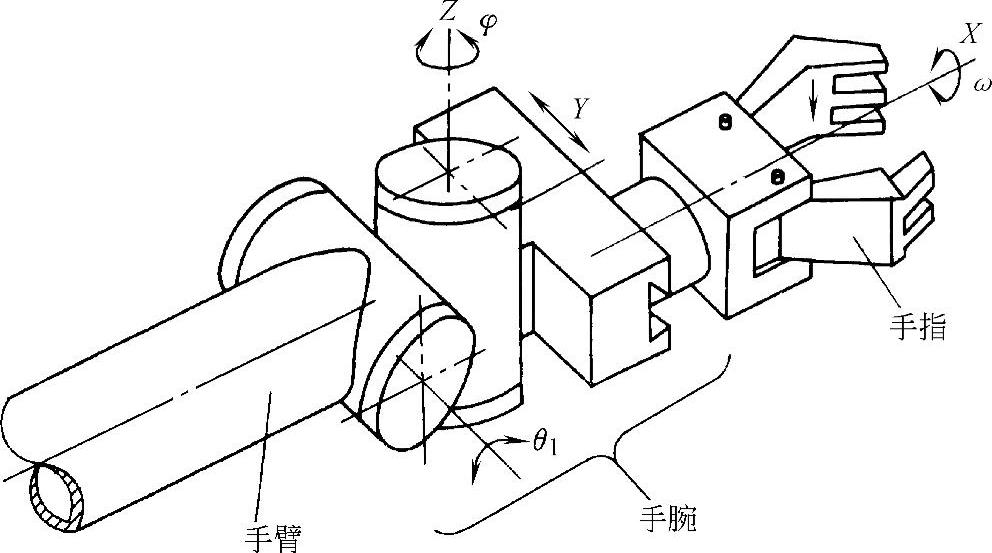
图7-3-7 手腕运动示意图(https://www.daowen.com)
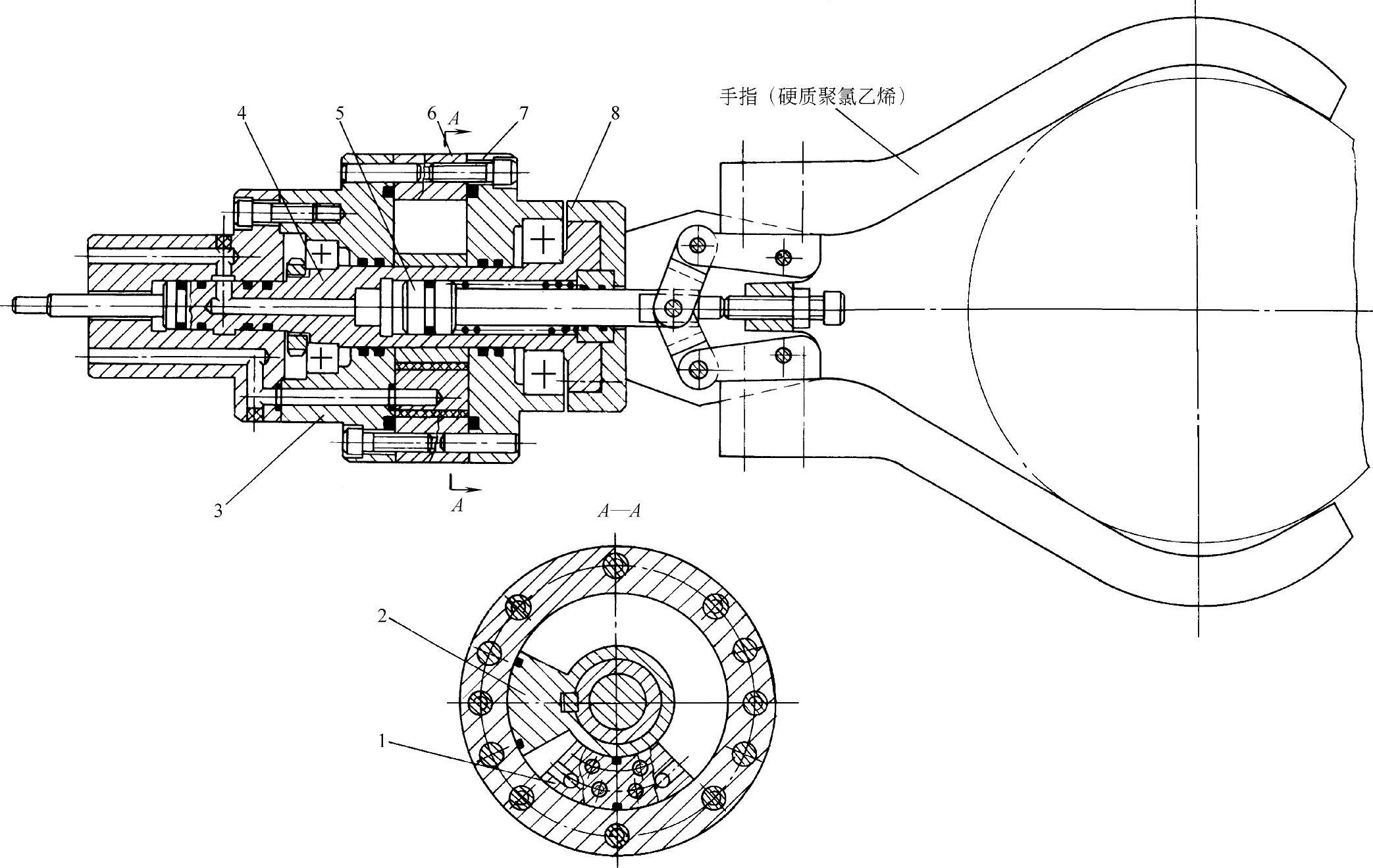
图7-3-8 手腕回转结构
1—定片 2—动片 3—后盖 4—夹紧缸体 5—活塞杆 6—回转缸体 7—前盖 8—指座
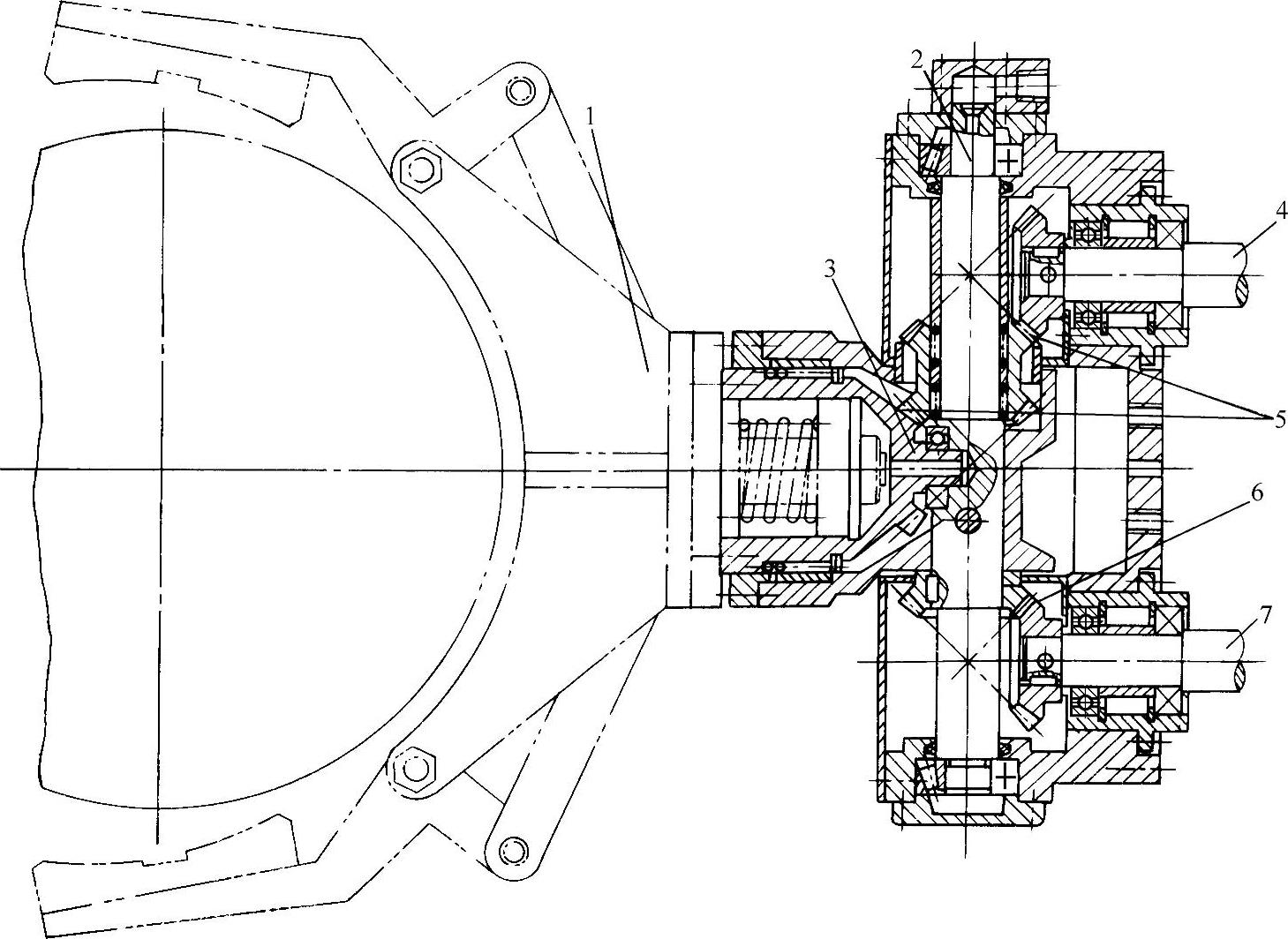
图7-3-9 具有回转和俯仰的腕部结构
1—手部 2—传动轴 3—回转轴 4、7—驱动轴 5、6—锥齿轮
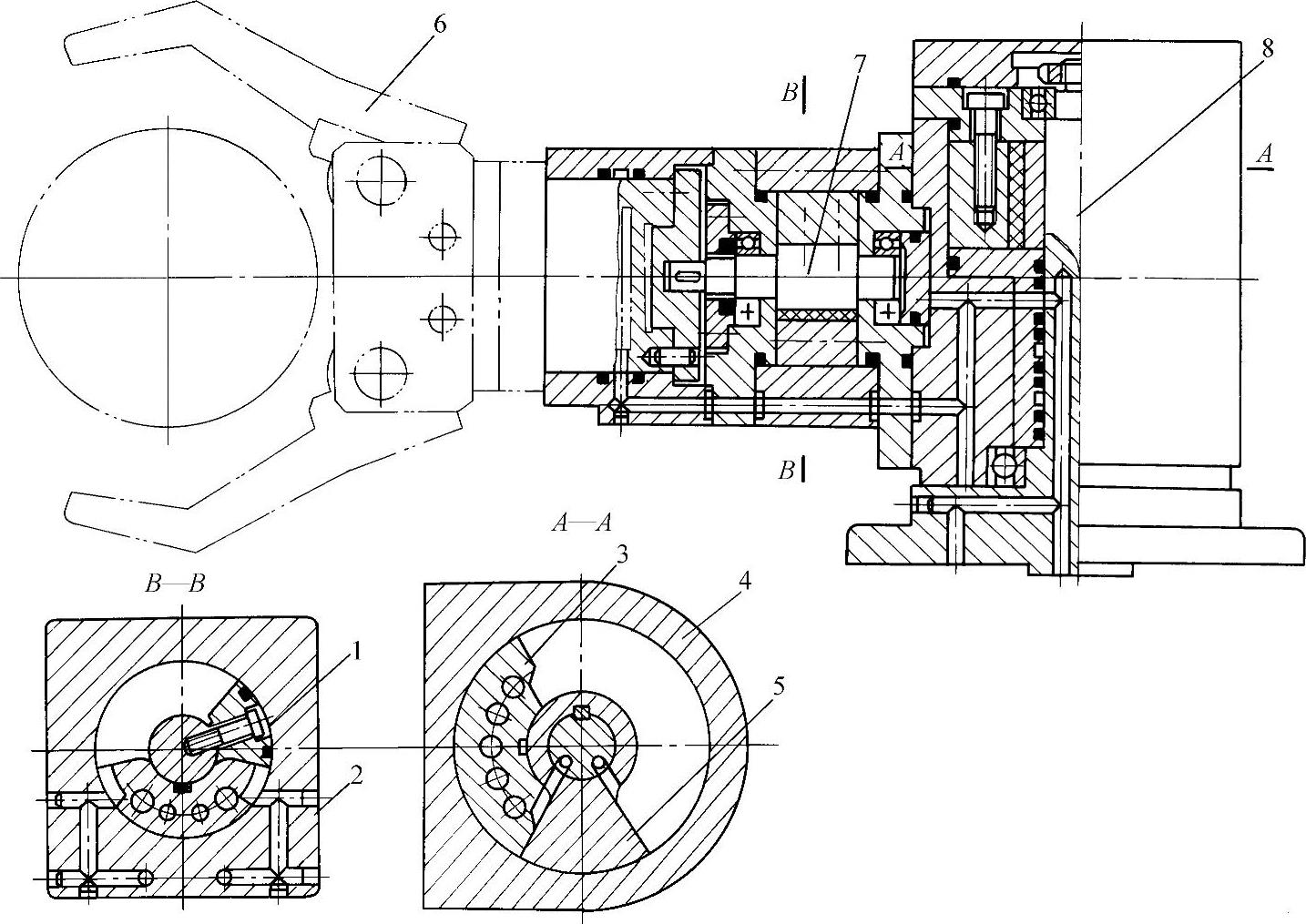
图7-3-10 具有回转和摆动的腕部结构
1—动片 2—摆动缸 3—动片 4—摆动缸 5—定片 6—手部 7—回转轴 8—固定中心轴
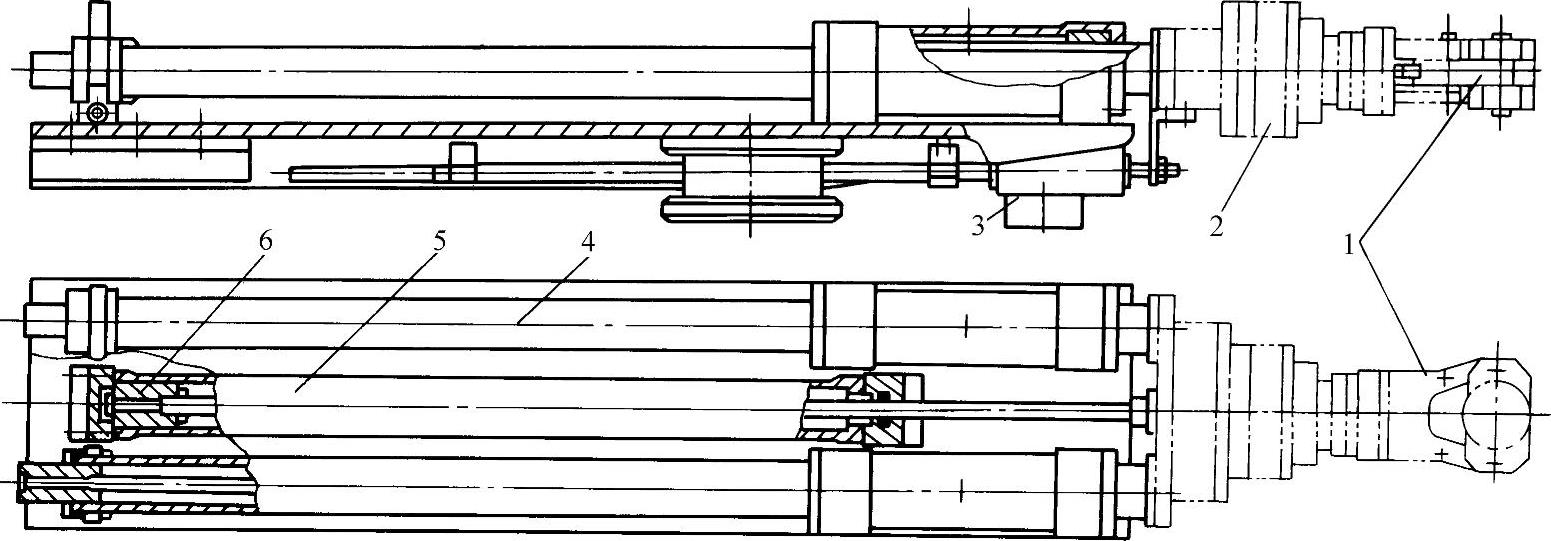
图7-3-11 双导向管臂部
1—手部 2—腕部 3—电位器 4—导向管 5—液压缸 6—活塞
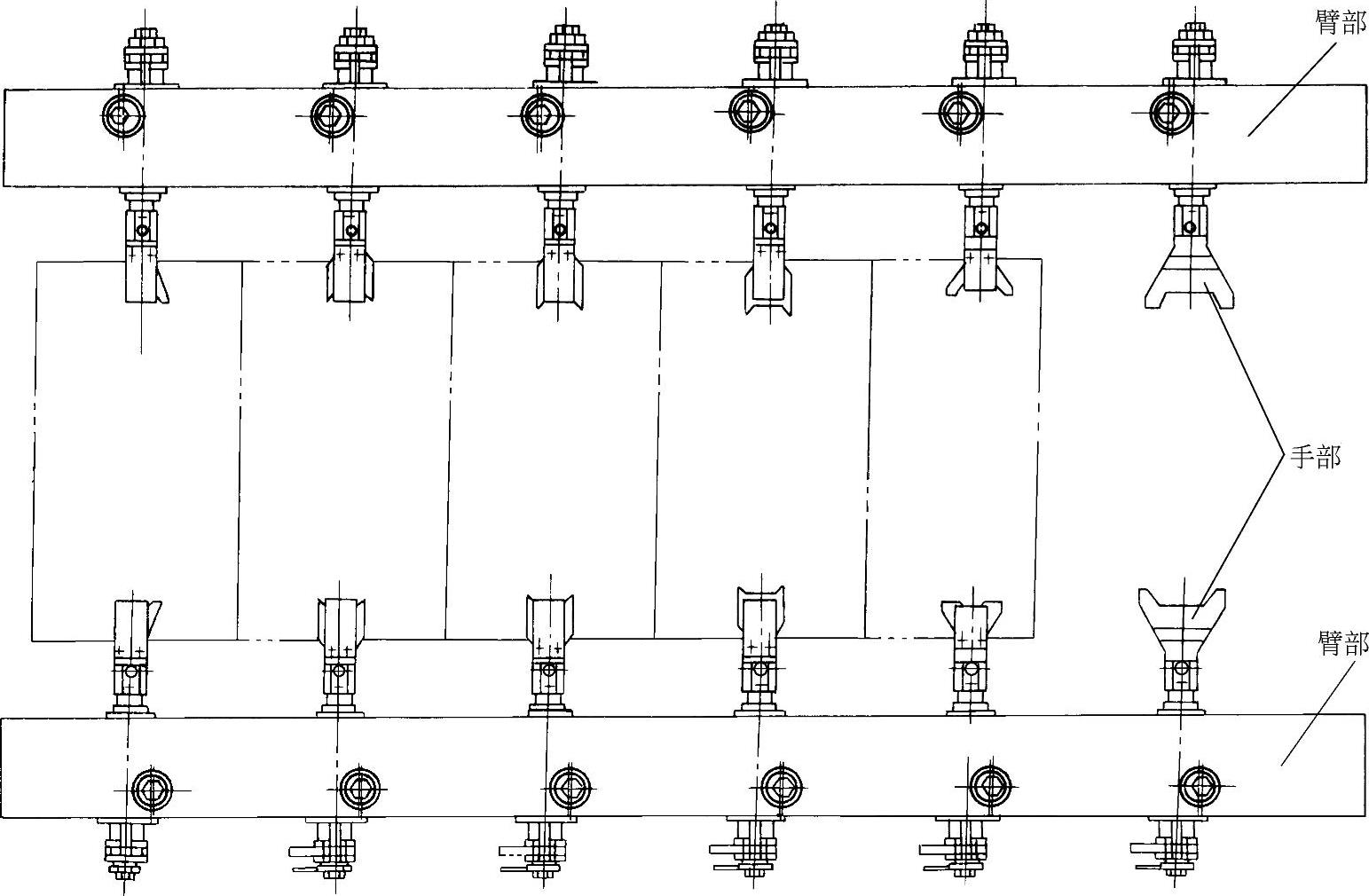
图7-3-12 步进梁机械手臂部