一
、锻造机械手的手部
1.手部的结构形式
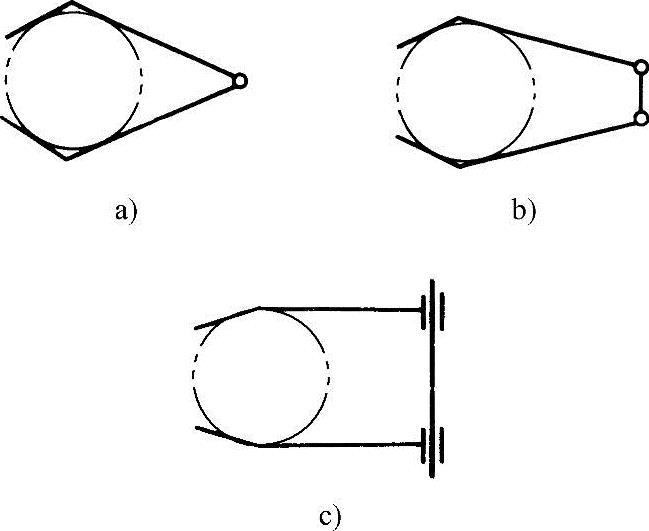
锻造机械手的手部结构以手指式为主。手指式手部按手指的运动形式可分为回转型和平移型,回转型又分为单支点和双支点两种(见图7-3-2)。

图7-3-2 手指类型
a)单支点回转型 b)双支点回转型 c)平移型
2.手指式手部的典型结构(https://www.daowen.com)
手指式手部的典型结构如图7-3-3~图7-3-6所示。
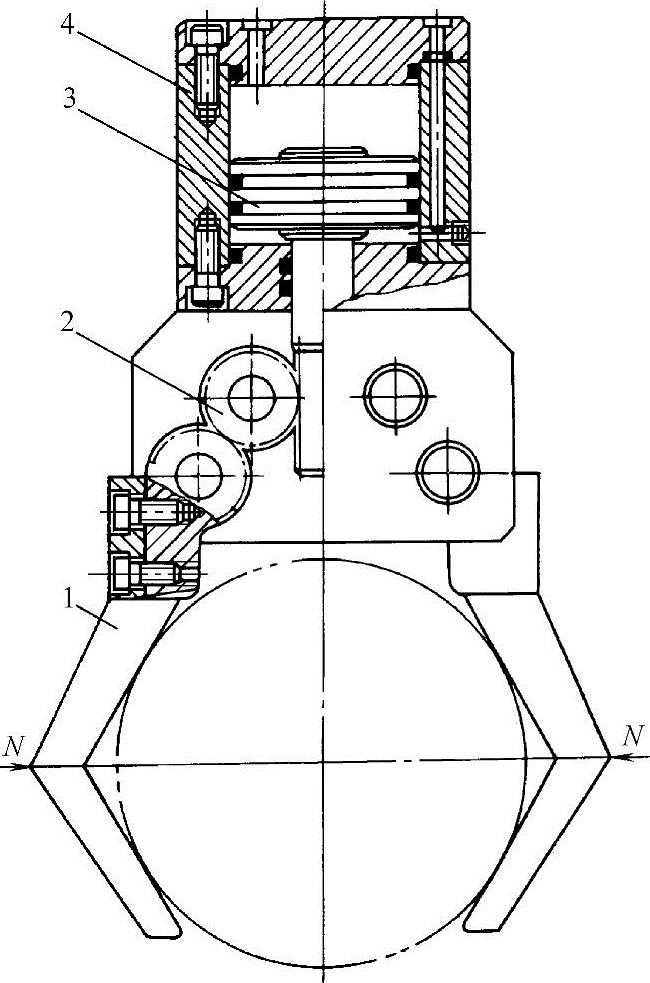
图7-3-3 齿轮传动手部结构
1—V形手指 2—齿轮 3—活塞 4—缸体
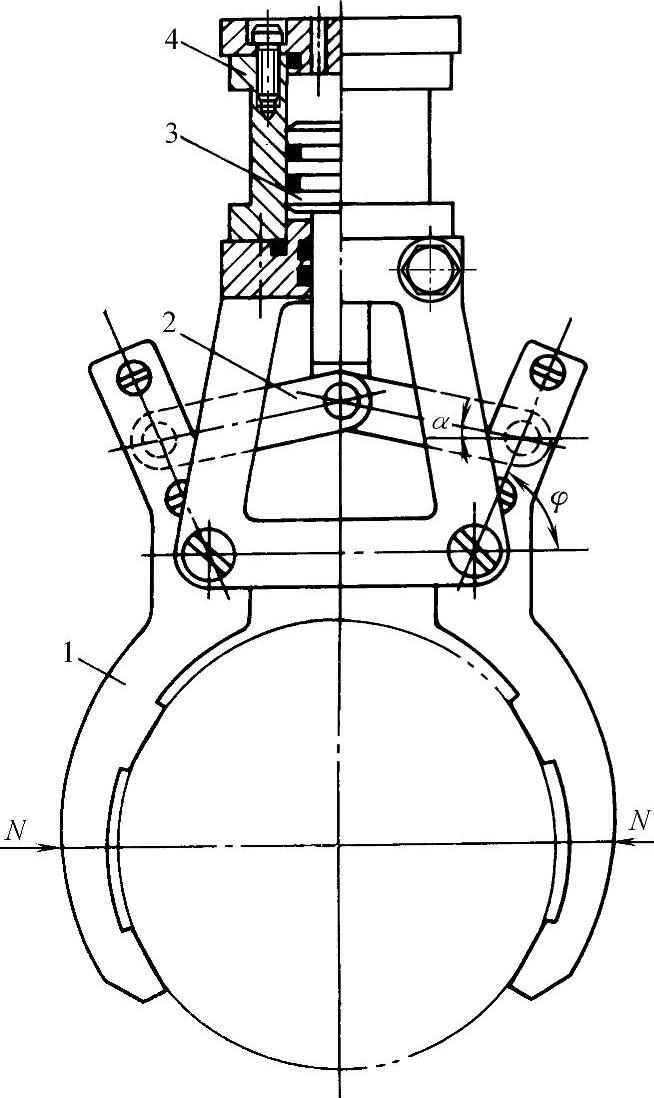
图7-3-4 连杆传动手部结构
1—曲面手指 2—连杆 3—活塞 4—缸体