冲压机械手的手腕
2026年01月15日
三
、冲压机械手的手腕
手腕是联接手指和手臂的构件,它具有独立的自由度,以使机械手适应更复杂的动作要求。设计与选用手腕时,应考虑以下两个因素。
1.自由度的选取
1)在手臂运动范围内能满足夹持和传送工件要求时,应尽量不选用手腕动作,以简化手腕结构,降低成本,提高精度。
2)当被抓取的工件有转位(或俯仰)要求(一般要求为90°或180°)时,可增加手腕的回转动作,因为用手臂完成回转动作时,惯性非常大,会影响定位精度。
3)有时为了装卸工件(如将工件送入模腔内),可令手腕增加横向移动动作。
2.手腕结构选用(https://www.daowen.com)
手腕的结构如图7-4-18所示,它可作与手臂垂直方向(如Y轴方向)的横移,还可绕Y轴或Z轴回转θ1或φ角。通常横移机构可采用直线缸(见图7-4-19)或采用电磁铁动力源。回转运动则采用小于360°的摆动缸作为动力源(见图7-4-21)。
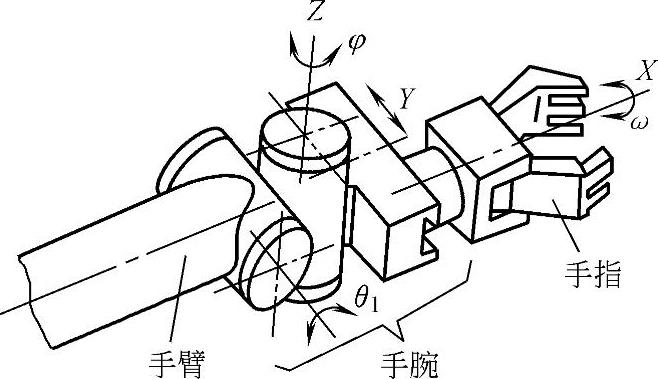
图7-4-18 手腕运动示意图
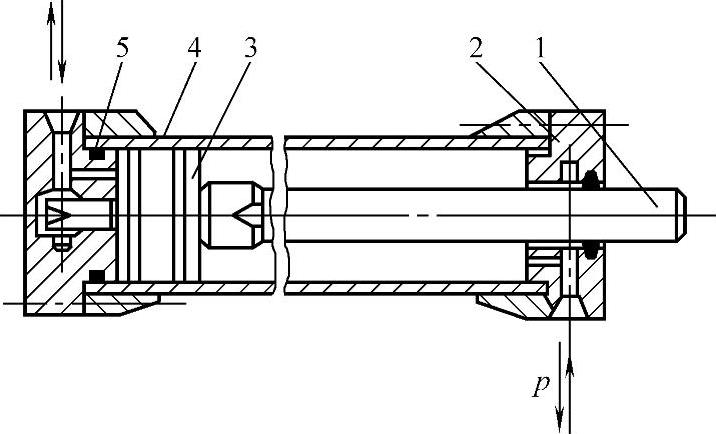
图7-4-19 横移用的往复直线缸
1—活塞杆 2—端盖 3—活塞 4—缸体 5—缓冲部分