二、钳杆旋转机构
2026年01月15日
二
、钳杆旋转机构
锻造时要求工件能左右翻转,因而钳杆应能绕轴线作正反向旋转,并能在任意转角上停止。
1.结构及动作原理
钳杆旋转机构根据驱动方式不同,可分为以下两种:
(1)电动机驱动如图7-1-13所示 电动机1通过行星齿轮减速器3及齿轮4、5和6带动钳杆7转动。制动器2使钳杆能及时停止在某一位置。
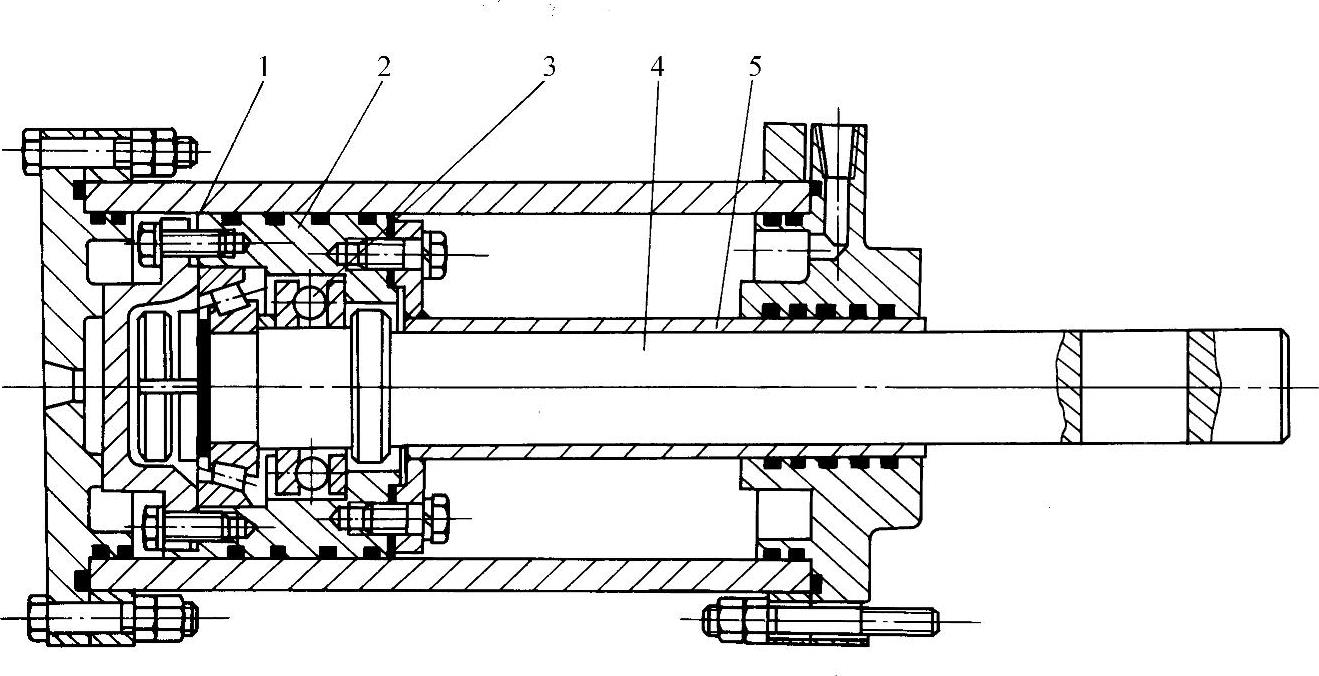
图7-1-11 夹紧液压缸
1—缸体 2—活塞 3—推力轴承 4—活塞杆 5—套管
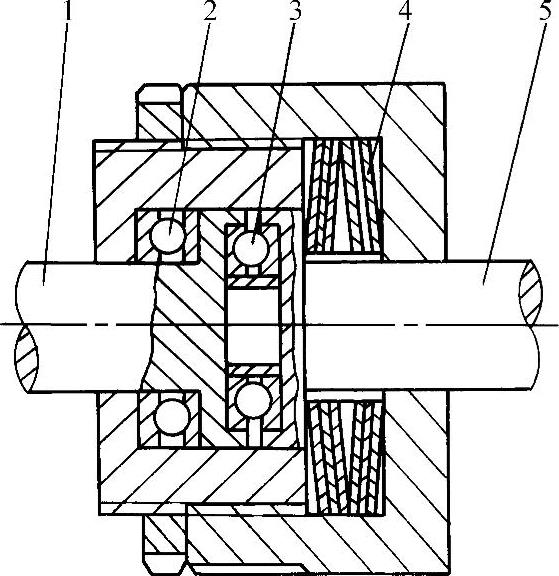
图7-1-12 隔转装置
1—活塞杆 2、3—推力轴承 4—碟形弹簧 5—拉杆
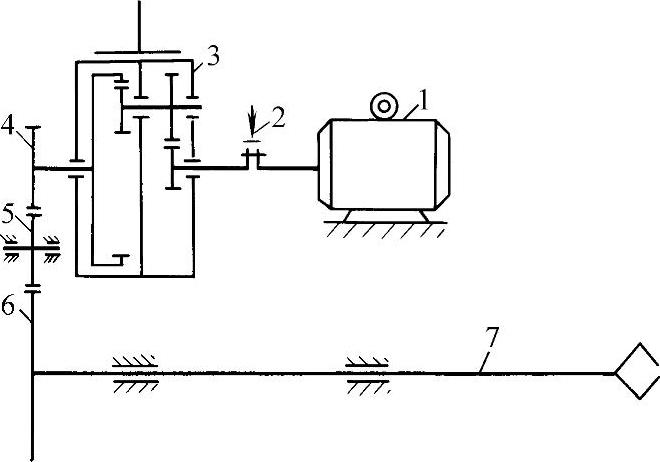
图7-1-13 电动机驱动的钳杆旋转机构
1—电动机 2—制动器 3—行星齿轮减速器 4、5、6—齿轮 7—钳杆(https://www.daowen.com)
(2)液压马达驱动 如图7-1-14所示液压马达1通过齿轮2、3和4带动钳杆5转动。为使传动简单,常采用低速大扭矩液压马达。
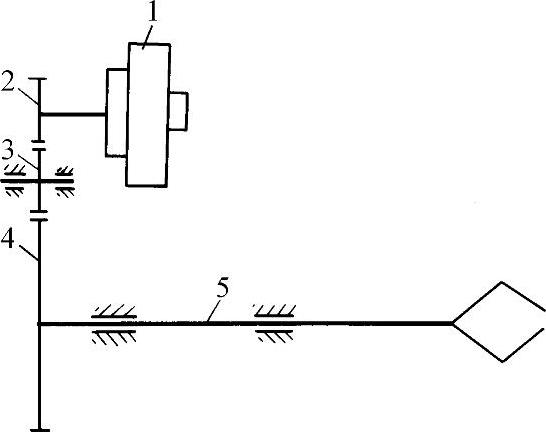
图7-1-14 液压马达驱动的钳杆旋转机构
1—液压马达 2、3、4—齿轮 5—钳杆
在液压系统应装设安全溢流阀以达到超载保护的目的。
2.超载保护装置
为了防止锻件未放妥,上砧突然压住旋转着的锻件,使旋转着的原动机超载,造成钳杆旋转机构损坏,因此在钳杆旋转机构中要考虑超载保护问题。同时有了超载保护装置以后,在操作机做精锻、滚圆等快速动作时,可以使原动机在锻造过程中连续运转,在上砧接触锻件的瞬间,超载保护装置打滑,减少起动和停止的操作,提高生产率。
图7-1-15所示为摩擦式过载保护装置。
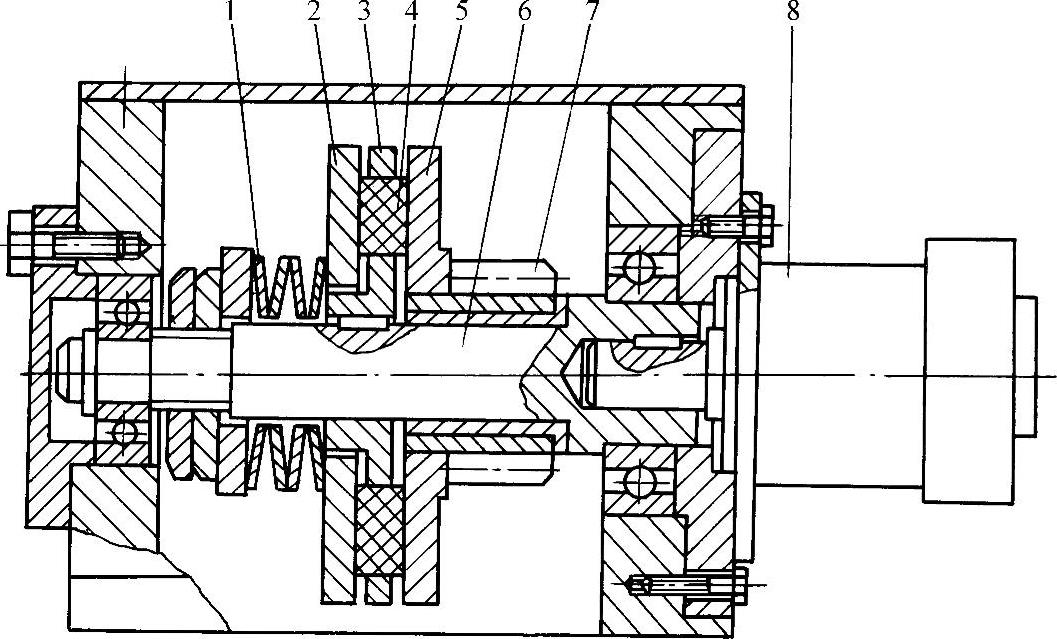
图7-1-15 摩擦式过载保护装置
1—碟形弹簧 2、5—摩擦盘 3—圆盘 4—摩擦块 6—轴 7—齿轮 8—液压马达
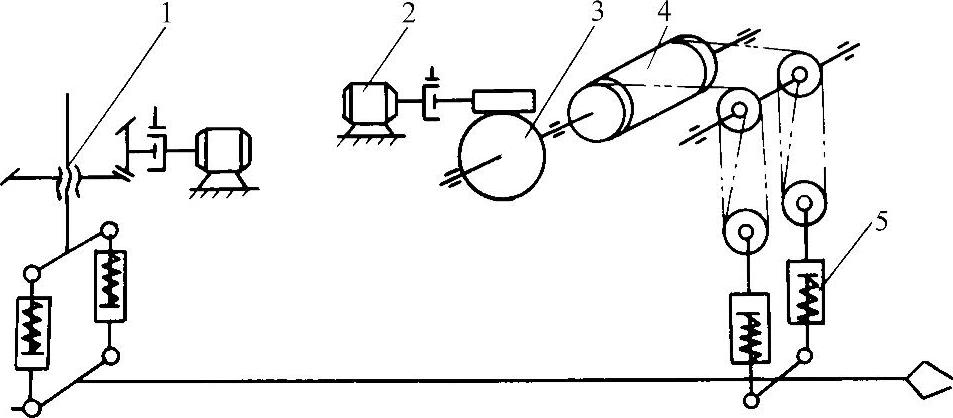
图7-1-16 机械式钳杆升降机构
1、4—升降机构 2—电动机 3—蜗轮副 5—缓冲器