液压驱动通用机械手
2026年01月15日
二
、液压驱动
通用机械手
图7-4-26所示为圆柱坐标和球坐标相结合形式的液压驱动机械手,它的动作范围如图7-4-27所示。该机械手的结构组成如图7-4-26所示,主要包括机械结构部分、液压驱动部分和电气控制系统。其主要技术参数为:
手臂臂力为100kN,有6个自由度:
1)手臂前后伸缩(行程为630mm)。
2)手臂左右转动(角度为220°)。
3)手臂上下升降(行程40mm)。
4)手臂上下摆动(角度为60°)。
5)手腕旋转(角度为180°)。(https://www.daowen.com)
6)手腕上下摆动(角度130°)。
手臂最大工作半径为1900mm。随动系统任意定位,定位精度为±1mm。简易数控,每个循环程序数16个。
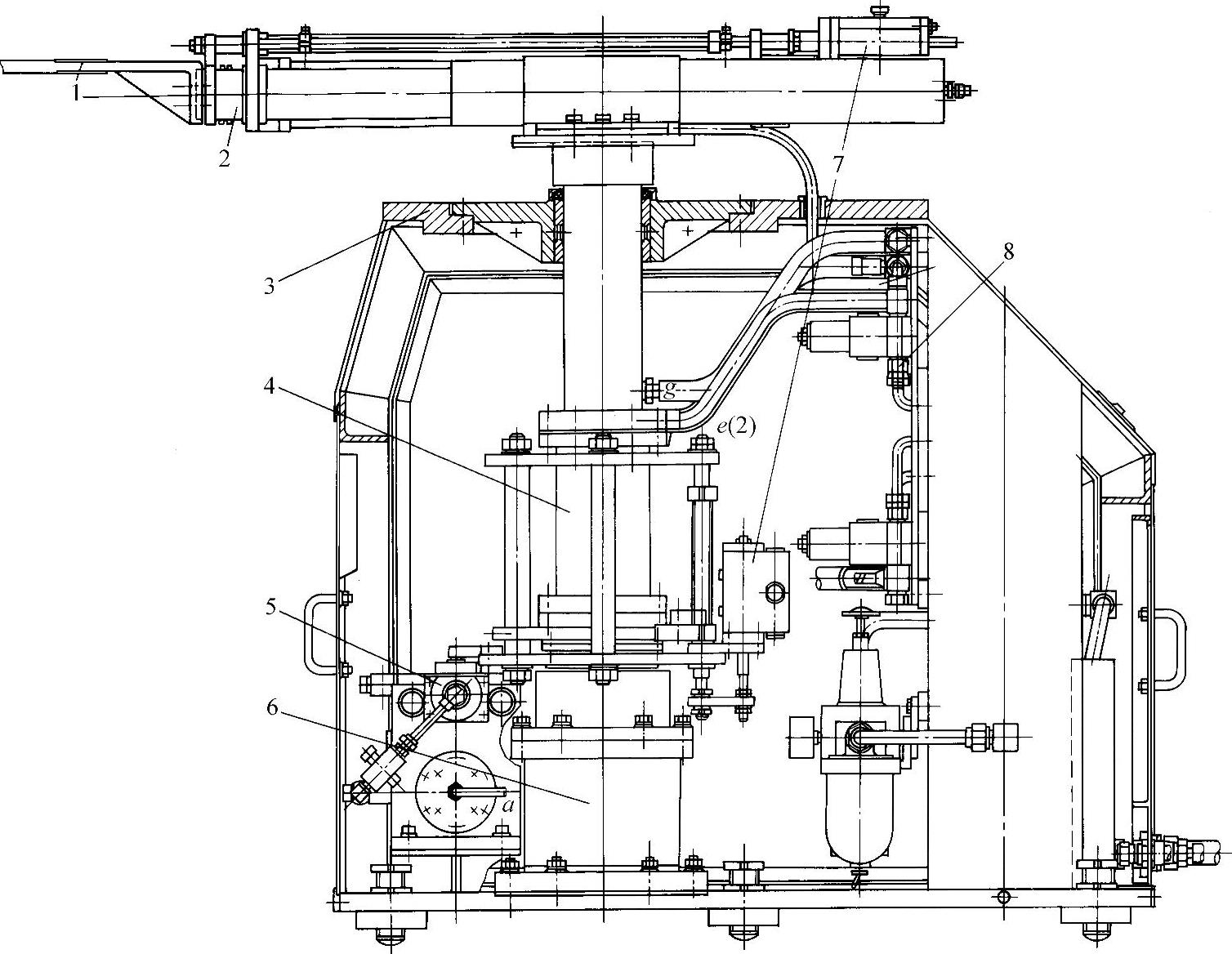
图7-4-25 气动通用机械手总装图
1—小臂托架 2—手臂前后伸缩部分 3—机座 4—手臂左右转动与上下升降部分 5—手臂转动缓冲器 6—转动气缸 7—手臂前后伸缩与上下升降缓冲器 8—气动元件安装部分
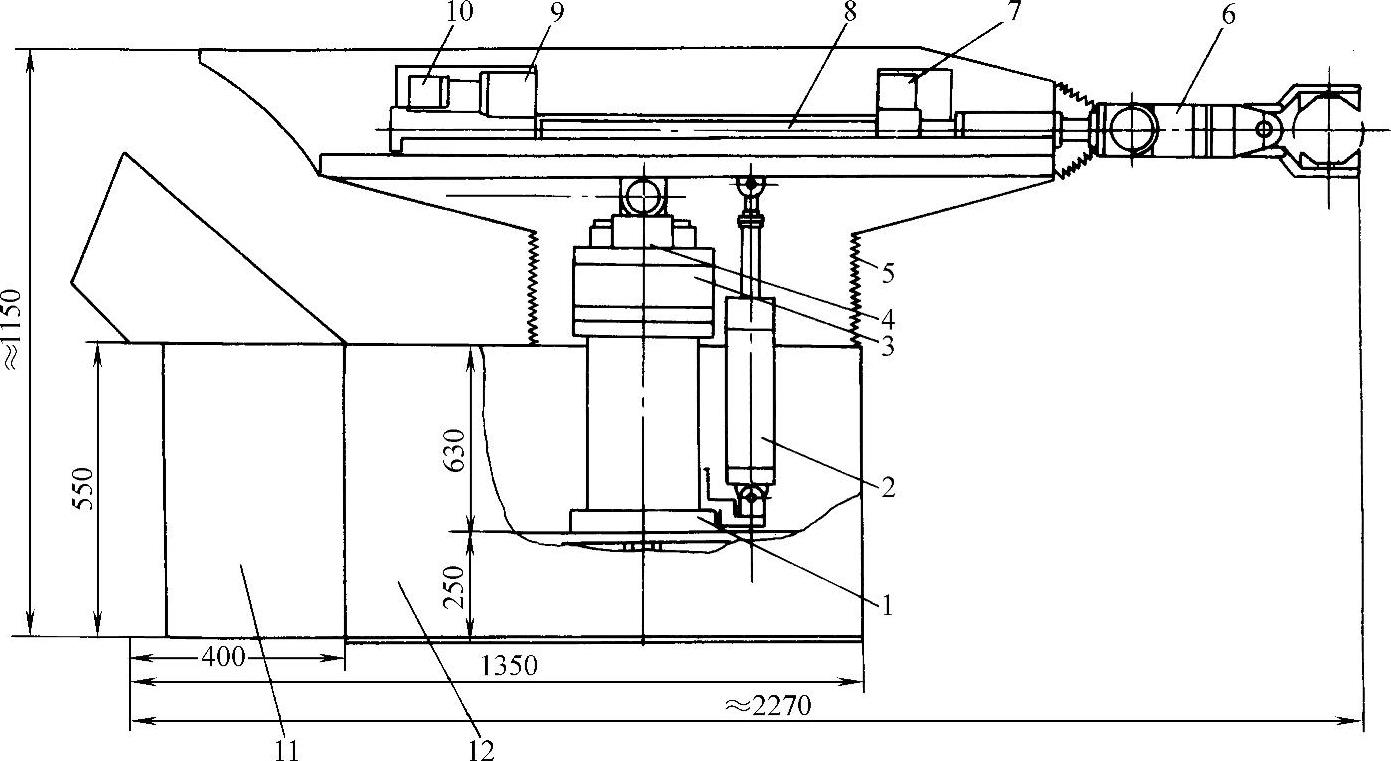
图7-4-26 通用液压驱动机械手结构简图
1—手臂上下升降液压缸 2—手臂上下摆动液压缸 3—手臂左右转动液压缸 4—手臂上下摆动机械反馈装置 5—防尘罩 6—手腕回转及手指握紧液压缸 7—手臂前后伸缩机械反馈装置 8—手臂前后伸缩液压缸 9—手腕上下摆动回转液压缸 10—手腕上下摆动机械反馈装置 11—电气控制装置 12—液压驱动装置
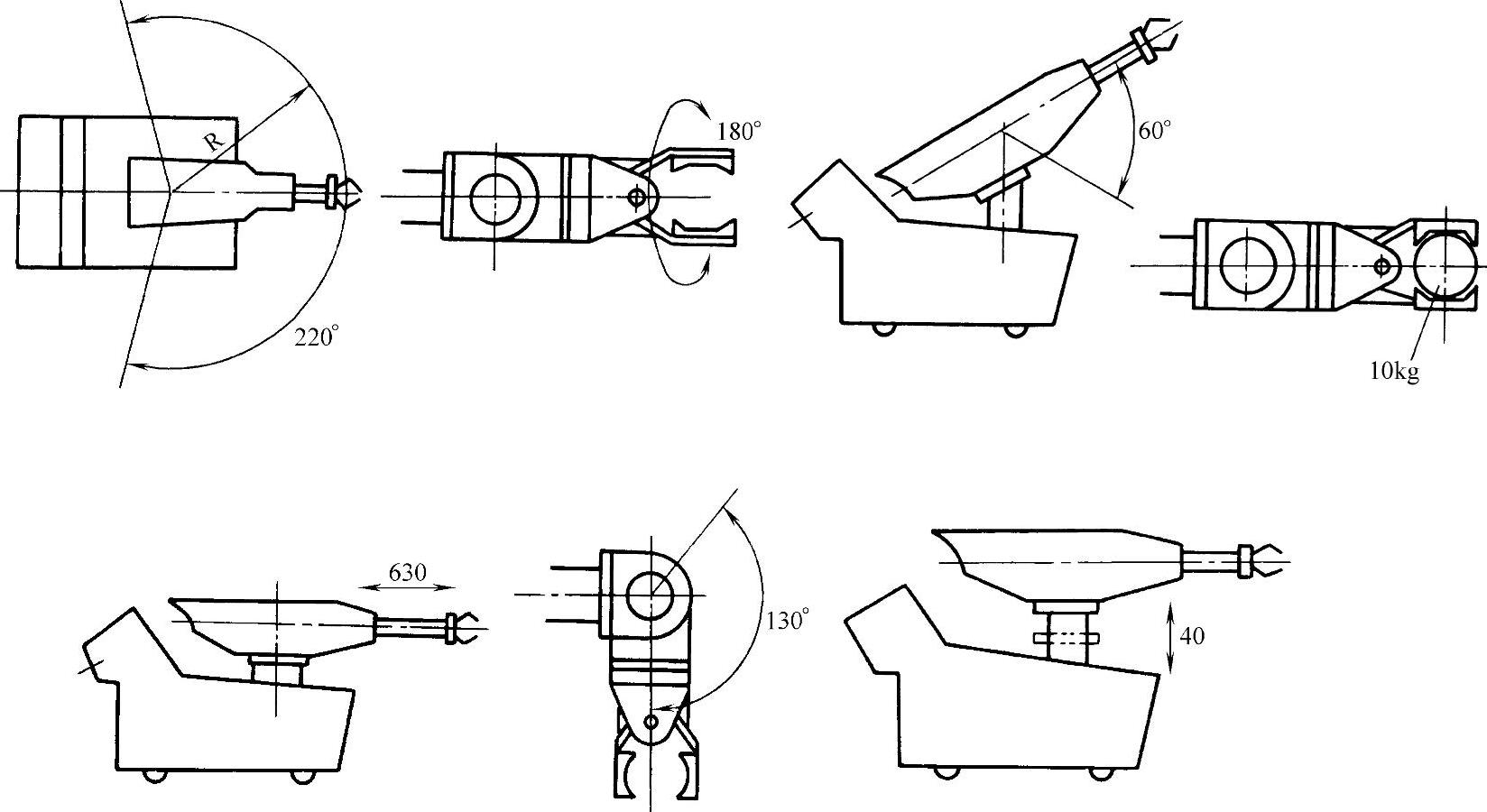
图7-4-27 液压驱动机械手的动作范围